 |
|
Популярные авторы:: БСЭ :: Андерсон Пол Уильям :: Дойл Артур Конан :: Желязны Роджер :: Биленкин Дмитрий Александрович :: Андреев Леонид Николаевич :: Куприн Александр Иванович :: Твен Марк :: Говард Роберт Ирвин :: Коллектив Рубоард Популярные книги:: Справочник по реестру Windows XP :: Маски :: Мясоеды :: Чайная роза :: Бурый волк :: Затишье :: Шакир :: Мальчик Толя в стране идиотов :: Несговорчивая невеста :: И явилось новое солнце |
Большая Советская Энциклопедия (АВ)ModernLib.Net / Энциклопедии / БСЭ / Большая Советская Энциклопедия (АВ) - Чтение (стр. 27)
Каждое рабочее место учащегося оборудовано пультом ввода информации и устройством вывода. С пульта ввода учащийся запрашивает задание на обучение, вводит в ЦВМ ответы на контрольные вопросы. На цифровых индикаторах устройства вывода фиксируется адрес (номер) карточки с информационным материалом, который следует просмотреть учащемуся. В состав отдельных устройств вывода входят управляемые диапроекторы, которые по сигналам ЦВМ могут демонстрировать учащемуся тот или иной диапозитив или кадр киноплёнки. Преподаватель с помощью специального выводного устройства в виде табло получает информацию о количестве материала, пройденного каждым учащимся.
Лит.:Чиликин М. Г., Использование технических средств в учебном процессе, «Известия высших учебных заведений. Радиотехника», 1963, № 4; Сборник докладов Московского энергетического института по вопросу об эффективных методах обучения, ч. 1-2, М., 1966; Ростунов Т. И., Программированное обучение и обучающие машины, К., 1967. Ю. Н. Кушелев, И. М. Глыздов, В. Н. Ермаков. 
Рис. 1. Автоматизированного обучения класс, оборудованный информационно-контролирующими устройствами «Экзаменатор МЭИ». 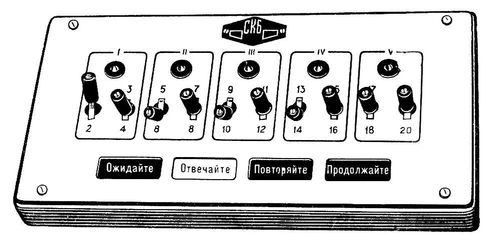
Рис. 2. Индивидуальный пульт учащегося. Автоматизм Автомати'зм, 1) в физиологии способность органа или отдельных клеток к ритмической, периодической или апериодической деятельности, вне очевидной связи с внешними побудительными причинами (например, сокращения сердца, петли кишки, даже удалённых из организма, мерцание «ресничек» некоторых эпителиальных клеток, движение протоплазмы в растительных клетках и т. п.). Причиной А. является либо цикличность обменных процессов в клетках, либо - на более высокой ступени организации - деятельность систем возбудимых клеток (например, нервных клеток, расположенных в сердечной мышце или дыхательном центре в мозгу). Другой формой А., возникающей в результате закрепления условно-рефлекторных связей (см. Условные рефлексы),являются стереотипные действия, осуществляемые пассивно, «машинообразно», например движения конечностей при ходьбе, а также т. н. содружественные движения, захватывающие различные группы мышц (шеи, туловища, конечностей) и другие двигательные А. (см. Движения животных и человека ). Л. П. Латаш 2) В психологии действие, осуществляющееся при почти полном отсутствии контроля сознания. В отличие от физиологических процессов (дыхание, работа сердца и т. п.), являющихся изначально непроизвольными, психические действия первоначально протекают под контролем сознания и лишь постепенно, по мере научения, превращаются в автоматические, которые выступают как основа различного рода навыков. На физиологическом уровне А. соответствует динамический стереотип. В. А. Костеловский. Автоматика Автома'тика,отрасль науки и техники, охватывающая теорию и принципы построения систем управления, действующих без непосредственного участия человека; в узком смысле - совокупность методов и технических средств, исключающих участие человека при выполнении операций конкретного процесса. Как самостоятельная область техники А. получила признание на 2-й Мировой энергетической конференции (Берлин, 1930), где была создана секция по вопросам автоматического и телемеханического управления. В СССР термин «А.» получил распространение в начале 30-х гг. А. как наука возникла на базе теории автоматического регулирования, основы которой были заложены в работах Дж. К. Максвелла (1868), И. А. Вышнеградского (1872-1878), А. Стодолы (1899) и др.; в самостоятельную научно-техническую дисциплину окончательно оформилась к 1940. История А. как отрасли техники тесно связана с развитием автоматов, автоматических устройств и автоматизированных комплексов. В стадии становления А. опиралась на теоретическую механику и теорию электрических цепей и систем и решала задачи, связанные с регулированием давления в паровых котлах, хода поршня паровых и частоты вращения электрических машин, управления работой станков-автоматов, АТС, устройствами релейной защиты. Соответственно и технические средства А. в этот период разрабатывались и использовались применительно к системам автоматического регулирования (см. Автомат , Автоматическое управление, Регулирование автоматическое).Интенсивное развитие всех отраслей науки и техники в конце 1-й половины 20 в. вызвало также быстрый рост техники автоматического управления, применение которой становится всеобщим. 2-я половина 20 в. ознаменовалась дальнейшим совершенствованием технических средств А. и широким, хотя и неравномерным для разных отраслей народного хозяйства, распространением автоматических управляющих устройств с переходом к более сложным автоматическим системам, в частности в промышленности - от автоматизации отдельных агрегатов к комплексной автоматизации цехов и заводов (см. Автоматизация производства ). Существенной чертой является использование А. на объектах, территориально расположенных на больших расстояниях друг от друга, например крупные промышленные и энергетические комплексы, системы управления космическими летательными аппаратами и т. д. Для связи между отдельными устройствами в таких системах применяются средства телемеханики, которые совместно с устройствами управления и управляемыми объектами образуют телеавтоматические системы. Большое значение при этом приобретают технические (в т. ч. телемеханические) средства сбора и автоматической обработки информации, т. к. многие задачи в сложных системах автоматического управления могут быть решены только с помощью вычислительной техники (см. Большая система, Аналоговая вычислительная машина, Цифровая вычислительная машина ). Наконец, теория автоматического регулирования уступает место обобщённой теории автоматического управления, объединяющей все теоретические аспекты А. и составляющей основу общей теории управления (см. Управляющая машина, Кибернетика).
Лит.см. при статьях Автоматическое управление, Автоматизация производства, Кибернетика. Г. И. Белов. «Автоматика и телемеханика» «Автома'тика и телемеха'ника»,ежемесячный научно-технический журнал, орган АН СССР. Издаётся в Москве. Основан в 1936 (в 1942-45 не издавался). Тираж (1969) 7,5 тыс. экземпляров. Освещает проблемы теории автоматического регулирования и управления, обобщение опыта автоматизации, телемеханизации и управления производственными процессами, управления в области биологии и медицины, управления сложными системами, а также создание новых элементов автоматики и конструирования соответствующей аппаратуры и оборудования. «Автоматика, телемеханика и связь» «Автома'тика, телемеха'ника и связь»,ежемесячный массовый производственно-технический журнал, орган Министерства путей сообщения СССР. Издаётся в Москве. Основан в 1957. Тираж (1969) 32 тыс. экземпляров. Освещает вопросы конструкции, монтажа и эксплуатации устройств автоматики, телемеханики и связи на железнодорожном транспорте, пропагандирует новую технику и передовые методы. Автоматики и телемеханики (технической кибернетики) институт Автома'тики и телемеха'ники (техни'ческой киберне'тики) институ'т(ИАТ), научно-исследовательский институт, разрабатывающий теоретические проблемы управления. Создан в 1939 в Москве в составе Отделения технических наук АН СССР. В тематике ИАТ: проблемы теории автоматического управления; теории больших систем; проблемы распознавания образов; теоретические вопросы обучения автоматов; методы моделирования; разработка систем автоматического управления для различных отраслей народного хозяйства; принципиальные вопросы создания новых элементов и технических средств автоматизации и вопросы их надёжности; проблемы бионики и др. ИАТ координирует исследования в стране по проблемам автоматического управления, ведёт большую консультативную работу, активно осуществляет международные научные связи. При институте имеется аспирантура. Награжден орденом Ленина (1969). Автоматическая линия Автомати'ческая ли'ния,система машин, комплекс основного и вспомогательного оборудования, автоматически выполняющего в определённой технологической последовательности и с заданным ритмом весь процесс изготовления или переработки продукта производства или части его. В функции обслуживающего персонала А. л. входят: управление, контроль за работой агрегатов или участков линии, их ремонт и наладка. Линии, которые для выполнения части операций производственного процесса требуют непосредственного участия человека (например, пуск и остановка отдельных агрегатов, закрепление или перемещение продукта переработки), называются полуавтоматическими. На современных А. л. механизированы и автоматизированы многие вспомогательные операции (например, уборка отходов производства), контроль качества продукции, учёт выработки и др. На многих А. л. автоматически регулируются параметры технологических процессов, осуществляются автоматическое перемещение рабочих органов, наладка и переналадка оборудования. Создание и внедрение А. л. - один из важнейших этапов автоматизации производства,переход от отдельных автоматов к автоматическим системам машин и автоматизированным комплексам, часто объединяющим разнохарактерные производственные процессы. Автоматизированное поточное производство возникло в некоторых отраслях промышленности (например, в химической и пищевой) уже в начале 20 в. в основном на таких производственных участках, где технология вообще не может быть организована по-другому, например при крекинге нефти. Однако сам термин «А. л.» появился значительно позже применительно к системам металлообрабатывающих станков и машин. Этим, в частности, объясняется то, что качественные и количественные показатели А. л. учитываются главным образом в машиностроении и металлообрабатывающей промышленности. Первые комплексные А. л. в машиностроении СССР были созданы в 1939 по предложению рабочего-рационализатора Волгоградского тракторного завода И. П. Иночкина. Тогда же на 1-м Государственном подшипниковом заводе в Москве были созданы А. л. для токарной обработки и шлифования деталей подшипников. Экспериментальным научно-исследовательским институтом металлорежущих станков в 1936 были разработаны проекты А. л. из агрегатных станков.Такие линии для оборонной промышленности строились в годы Великой Отечественной войны. Завод «Станкоконструкция» в 1945-46 изготовил ряд А. л. из агрегатных станков для обработки корпусных деталей тракторов и автомобилей. В 1947-50 впервые в мировой практике в СССР было создано комплексно-автоматизированное производство алюминиевых поршней для тракторных двигателей с автоматизацией всех процессов, включая загрузку сырья, плавление металла, дозирование расплавленного металла, отливку заготовок, термическую, механическую, химическую, антикоррозионную обработку, контроль качества и упаковку готовой продукции. В 1953-55 на 1-м Государственном подшипниковом заводе был создан комплексно-автоматизированный цех по изготовлению шариковых и роликовых подшипников, включая их обработку, контроль и сборку. Дальнейшим этапом в развитии А. л. явилось создание типовых быстропереналаживаемых многономенклатурных А. л. для обработки цилиндрических зубчатых колёс, ступенчатых и шлицевых валов. На таких линиях при незначительных затратах времени на переналадку возможна обработка нескольких однотипных деталей различных размеров; в то же время каждый станок линии может работать самостоятельно. Разработка типовых А. л. на базе машин и оборудования широкого назначения создала необходимые условия для серийного изготовления А. л. и их внедрения в серийное производство. А. л. широко применяются в пищевой промышленности, производстве бытовых изделий, в электротехнической, радиотехнической и химической отраслях промышленности. Наибольшее распространение А. л. получили в машиностроении. Многие из них изготовляются непосредственно на предприятиях с использованием уже действующего оборудования. А. л. для обработки строго определённых по форме и размерам изделий называются специальными; при изменении объекта производства такие линии заменяют или переделывают. Более широкими эксплуатационными возможностями обладают специализированные А. л. для обработки однотипной продукции в определённом диапазоне параметров. При изменении объекта производства в таких линиях, как правило, лишь перенастраивают отдельные агрегаты и изменяют режимы их работы; основное технологическое оборудование в большинстве случаев может быть использовано для изготовления новой однотипной продукции. Специальные и специализированные А. л. применяются главным образом в массовом производстве. В серийном производстве А. л. должны обладать универсальностью и обеспечивать возможность быстрой переналадки для изготовления различной однотипной продукции. Такие А. л. называют универсальными быстропереналаживаемыми, или групповыми. Несколько меньшая производительность универсальных А. л. по сравнению со специальными компенсируется их быстрой переналадкой для производства широкой номенклатуры продукции. Структурная компоновка А. л. зависит от объёма производства и характера технологического процесса. Существуют линии параллельного и последовательного действия, однопоточные, многопоточные, смешанные (с ветвящимся потоком) ( рис. 1 ). А. л. параллельного действия применяются для выполнения одной операции, когда продолжительность её значительно превышает необходимый темп выпуска. Продукт переработки автоматически распределяется (из магазина или бункера) по агрегатам линии и после обработки приёмными устройствами собирается и направляется на последующие операции. Многопоточные А. л. представляют собой систему из А. л. параллельного действия, предназначенную для выполнения нескольких технологических операций, каждая из которых по продолжительности больше заданного темпа выпуска. В единую систему могут быть объединены несколько А. л. последовательного или параллельного действия. Такие системы называются автоматическими участками, цехами или производствами. Управление А. л. осуществляется системами автоматического управления,которые подразделяются на внутренние и внешние. Внутренние системы управления обеспечивают выполнение отдельным агрегатом или механизмом линии всех основных и вспомогательных операций технологического процесса на данном агрегате. Внешняя система (как правило, система путевого контроля, организованного по принципу обратной связи) обеспечивает согласованную работу агрегатов и участков линии. В зависимости от конкретных условий системы управления А. л. строятся на электрических, механических, гидравлических, пневматических или комбинированных связях. Для автоматического регулирования технологического процесса и переналадки оборудования на А. л. (преимущественно групповых) применяют системы электронного программного управления. Крупные комплексные А. л. оснащаются электронными управляющими машинами и другими средствами вычислительной техники. На агрегатах А. л. преимущественно применяется индивидуальный или многодвигательный электропривод и реже - регулируемый электрический, гидравлический или механический привод. Перемещение обрабатываемых деталей (продукта переработки) с одной рабочей позиции на другую осуществляется жёсткой или гибкой системой транспортирования. Жёсткая система транспортирования может пересекать рабочее пространство агрегатов А. л. или располагаться параллельно и иметь перпендикулярно смонтированные устройства для загрузки и разгрузки рабочих позиций. Рабочие позиции каждого агрегата находятся на одинаковом расстоянии одна от другой. После обработки на одной позиции деталь раскрепляется и передвигается на следующую рабочую позицию; при этом на первой позиции устанавливается новая заготовка, а на последней снимается готовое изделие. В зависимости от конструкции, размеров и формы изделий используются транспортёры шаговые, штангового типа, а также грейферные, пластинчатые, цепные и др. Жёсткие системы транспортирования применяются преимущественно на однопоточных линиях последовательного действия при изготовлении крупных штучных изделий (например, на линиях из агрегатных станков или линиях для механической обработки цилиндрических зубчатых колес, рис. 2 ). При гибкой системе транспортирования установка заготовок и снятие обрабатываемых изделий производятся независимо на каждом агрегате А. л.; передача изделий с одной позиции на другую может быть совмещена с рабочим процессом. Транспортирование обрабатываемых изделий между агрегатами осуществляется при помощи наклонных или вибрационных лотков, цепных, ленточных или желобчатых конвейеров и т. п. Гибкая система транспортирования наиболее эффективна при обработке мелких изделий на А. л. параллельного действия, а также на многопоточных и смешанных А. л. Обычно при гибкой системе транспортирования на каждой рабочей позиции устанавливают магазины или бункера-накопители. Их назначение - обеспечить работу А. л. при остановках отдельных агрегатов и облегчить обслуживание линий. Количество и ёмкость накопителей определяются сложностью и протяжённостью А. л., степенью надёжности и безотказностью работы агрегатов. Магазины (бункера-накопители) применяются также и на А. л. с жёстким транспортированием; в этом случае их встраивают в общую транспортную систему, обеспечивая независимую работу отдельных участков. Изделие при обработке остаётся неподвижным или перемещается прямолинейно (А. л. бесцентрово-шлифовальных станков), совершает круговое или вращательное движение (в автоматической роторной линии ). Неподвижные или вращающиеся изделия перед обработкой фиксируются в требуемом положении непосредственно на рабочей позиции или в приспособлении-спутнике. Прямолинейное или круговое перемещение изделия в процессе обработки обычно осуществляется транспортными средствами. Стабильность процесса на А. л. характеризуется временем, в течение которого необходимые параметры процесса выдерживаются в требуемых допусках. Стабильность качества продукции и устранение влияния погрешностей во время обработки на А. л. достигаются применением систематического контроля заданных параметров и активным воздействием на технологический процесс. Непосредственная эффективность А. л. сказывается, в частности, в уменьшении числа рабочих, ранее занятых на этом производстве. Но работа на А. л. требует более высокой квалификации обслуживающего персонала. Наиболее эффективны А. л. при комплексном внедрении совершенных технологических процессов. В условиях социалистического производства А. л. применяют для трудоёмких операций и вредных процессов, если это значительно облегчает труд рабочих и улучшает его условия. Однако, как правило, А. л. дают и необходимую экономическую эффективность, особенно высокую при комплексной автоматизации производства. Стоимость продукции, изготовляемой на А. л., зависит главным образом от стоимости исходных материалов и полуфабрикатов, производительности А. л. и затрат на их создание. Стоимость А. л. определяется количеством технологических операций, их сложностью, объёмом выпускаемой продукции, сложностью оборудования и систем управления, серийностью производства. При прочих равных условиях решающий фактор, определяющий стоимость А. л., - серийность производства её оборудования. Стоимость А. л. снижается при использовании нормализованных узлов, механизмов и инструментов, при централизованном изготовлении систем транспортирования и управления, сокращении длительности монтажа и наладки. Снижение стоимости А. л. расширяет экономически целесообразные области их применения, позволяет вводить в действие А. л., необходимые для технического перевооружения промышленности. Производительность А. л. зависит от времени, затрачиваемого на непосредственное осуществление рабочего процесса, времени на выполнение вспомогательных перемещений (несовмещенные транспортные операции, закрепление и открепление обрабатываемого изделия, отвод и подвод рабочих органов), времени на переналадку, наладку и восстановление работоспособности линии. Сокращение времени рабочего процесса достигается применением высокопроизводительной технологии. Уменьшение времени на вспомогательные перемещения достигается сокращением числа холостых перемещений или увеличением их скорости, совмещением во времени холостых перемещений с рабочим процессом. Для оценки производительности А. л. важен показатель цикловой непрерывности работы, который определяется (для дискретных процессов) отношением времени выполнения рабочего процесса к общему времени цикла. Время на подналадку, переналадку и ремонт сокращается при использовании автоматического регулирования, повышении стабильности рабочих инструментов и своевременной их замене. В промышленности СССР находятся в эксплуатации тысячи А. л. Например, только в металлообрабатывающей промышленности в 1967 действовало 4800 А. л. Лит.:Машиностроение. Энциклопедический справочник, т. 9, М., 1949; Владзиевский А. П., Автоматические линии в машиностроении, М., 1958; Шаумян Г. А., Автоматы и автоматические линии, 3 изд., М., 1961; Богуславский Б. Л., Автоматы и комплексная автоматизация, М., 1964. А. П. Владзиевский. 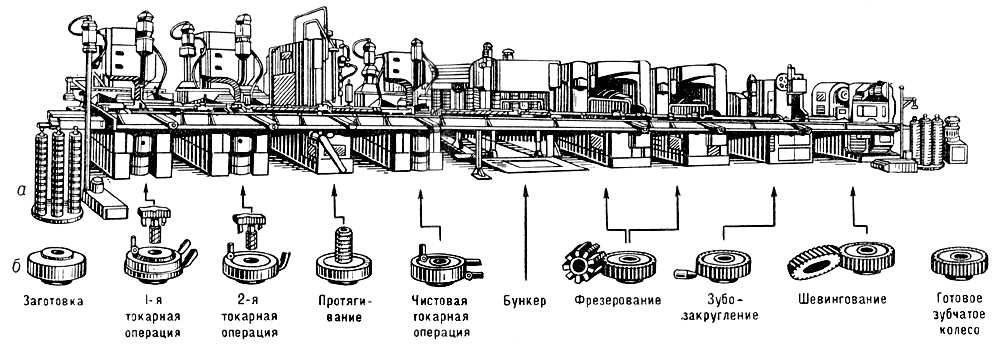
Рис. 2. Типовая автоматическая линия для обработки цилиндрических зубчатых колёс: а - общий вид; б - схема технологического процесса. 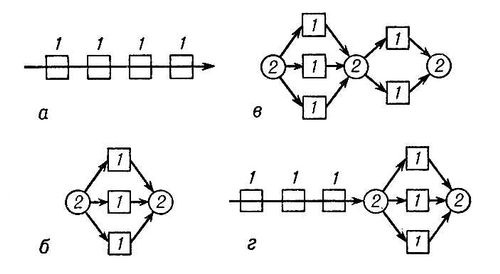
Рис. 1. Структурные компоновки автоматических линий: а - однопоточная последовательного действия; б - однопоточная параллельного действия; в - многопоточная; г - смешанная (с ветвящимся потоком); 1 - рабочие агрегаты: 2 - распределительные устройства. Автоматическая лунная станция Автомати'ческая лу'нная ста'нция(АЛС), космический аппарат, предназначенный для функционирования на поверхности Луны. Основная задача АЛС - проведение исследований физических условий на Луне и характеристик лунной поверхности, для чего на борту АЛС размещается научная аппаратура, а также радиотелеметрическая и телевизионная системы для передачи на Землю данных наблюдений и изображений лунной поверхности. Конструкция и аппаратура АЛС должны быть рассчитаны на работу в специфических условиях, существующих на Луне. Впервые в мире 3 февраля 1966 посадку на Луну совершила с помощью автоматической межпланетной станции советская АЛС «Луна-9», а затем «Луна-13» и АЛС США «Сервейер-1», «Сервейер-3», «Сервейер-5», «Сервейер-6», «Сервейер-7» (см. Космический летательный аппарат , Мягкая посадка).Описание отдельных АЛС см. в статьях «Луна» , «Сервейер» . Автоматическая межпланетная станция Автомати'ческая межплане'тная ста'нция(АМС), космический летательный аппарат, предназначенный для полёта к другим небесным телам и для изучения межпланетного космического пространства, Луны, планет. На борту АМС устанавливается соответствующая научная аппаратура. Результаты измерений передаются с борта АМС на Землю с помощью радиосистем, включая телевизионные системы для передачи изображений поверхности небесных тел. Обычно АМС снабжаются системами астроориентации и ракетным двигателем для коррекции траектории в полёте. Энергопитание бортовой аппаратуры АМС осуществляется от солнечных батарей.До 1 января 1969 запущено свыше 45 АМС: советские АМС серий «Луна», «Венера», «Марс» и «Зонд», американские АМС серий «Маринер», «Рейнджер», «Пионер» и др. Описание отдельных АМС см. в статьях «Луна» , «Венера» и др., см. также ст. Космический летательный аппарат. Автоматическая подстройка частоты Автомати'ческая подстро'йка частоты',радиотехническое устройство для автоматического удержания заданной частоты электрических колебаний генератора. А. п. ч. применяют в передатчике для поддержания определенной частоты задающего генератора,в супергетеродинном радиоприёмнике для точной настройки на принимаемую станцию, в синтезаторе частот для умножения или деления частоты и др. В распространённой схеме А. п. ч. отклонение частоты от заданной (расстройка частоты) преобразуется дискриминатором в постоянное напряжение соответствующего знака (полярности), пропорциональное амплитуде расстройки (при отсутствии расстройки напряжение на выходе дискриминатора равно нулю). Это выходное напряжение затем подаётся на управитель ( реактивного сопротивления лампа, реактивного сопротивления транзистор, варикапи др.), воздействующий на частоту генератора. Автоматическая регулировка усиления Автомати'ческая регулиро'вка усиле'ния(АРУ), система, автоматически изменяющая усиление приёмника электрических колебаний при изменении напряжения сигнала на его входе. В радиовещательных приёмниках АРУ иногда называют устарелым термином автоматическая регулировка громкости (АРГ), в приёмниках проводной связи - автоматической регулировкой уровня. В радиолокационных и других импульсных приёмниках применяют АРУ, учитывающие особенности работы в импульсном режиме. В большинстве случаев напряжение сигналов, поступающих на вход приёмника, значительно меняется: из-за различия мощностей передатчиков и расстояний их от места приёма, замираний сигналов при распространении, резкого изменения расстояний и условий приёма между передатчиком и приёмником, установленными на движущихся объектах (самолётах, автомобилях и т.д.), и других причин. Эти изменения приводят к недопустимым колебаниям или искажениям сигналов в приёмнике. Действие АРУ направлено на значительное уменьшение изменений напряжения выходных сигналов приёмника по сравнению с входными. Это осуществляется посредством цепей, которые передают выпрямленное детектором регулирующее напряжение на базы транзисторов или на управляющие сетки электронных ламп переменной крутизны,усилителей высокой, промежуточной частоты и преобразователя частоты, уменьшая их усиление с увеличением напряжения сигнала на входе и наоборот ( рис. 1 ). Таким образом происходит компенсация в приёмнике изменений напряжения входных сигналов. В устройствах радиосвязи распространены три типа АРУ: простая, задержанная и усиленно-задержанная. Наглядно действие АРУ можно отобразить на амплитудной характеристике приёмника ( рис. 2 ). При отсутствии АРУ амплитудная характеристика выражается прямой линией ( А -на рис. 2 ): напряжение сигнала на выходе прямо пропорционально входному. В результате действия простой АРУ ( В -на рис. 2 ) происходит только частичная компенсация изменения напряжения входных сигналов. Недостаток простой АРУ - снижение усиления слабых сигналов - устраняется «задержкой» начала действия АРУ. Задержанная АРУ ( Б -на рис. 2 ) действует так же, как и простая, когда напряжение сигнала на входе превысит некоторый уровень, определяемый напряжением задержки. Усиленно-задержанную АРУ с усилителем постоянного тока в цепи обратной связи применяют для получения большего постоянства напряжения сигнала на выходе приёмника (Г - на рис. 2 ). Наибольшее применение в приёмниках нашла задержанная АРУ. Лит.:Сифоров В. И., Радиоприемные устройства, 5 изд., М., 1954; Тартаковский Г. П., Динамика систем автоматической регулировки усиления, М. - Л., 1957. 
Рис. 2. Амплитудные характеристики радиоприёмников с различными типами автоматической регулировки усиления. Пунктиром показан уровень напряжения сигнала на выходе, при котором появляются искажения принятых сигналов. 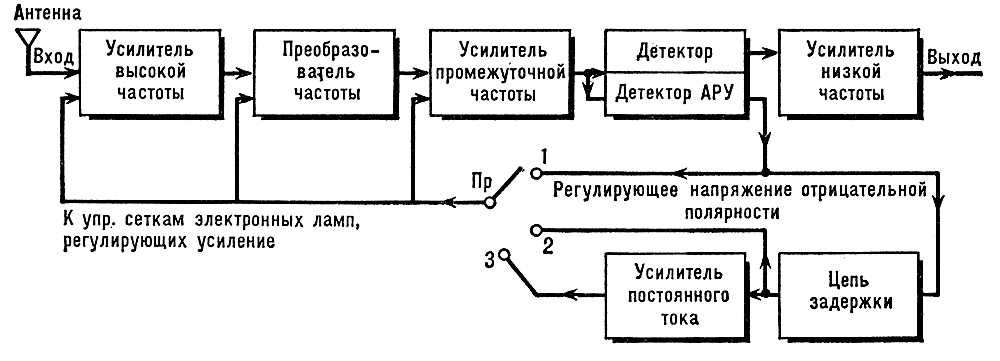
Рис. 1. Обобщённая блок-схема супергетеродинного радиоприёмника с различными типами автоматической регулировки усиления: в 1-м положении переключателя Пр - простая; во 2-м - задержанная; в 3-м - усиленно-задержанная. Автоматическая роторная линия Автомати'ческая ро'торная ли'ния,комплекс рабочих машин, транспортных устройств, приборов, объединённых единой системой автоматического управления, в котором одновременно с обработкой заготовки перемещаются по дугам окружностей совместно с воздействующими на них орудиями (см. Автоматическая линия ). Наиболее распространены А. р. л. для операций, выполняемых посредством прямолинейного рабочего движения (штамповка, вытяжка, прессование, сборка, контроль). А. р. л. состоит из рабочих роторов и транспортных роторов, передающих заготовки с одного рабочего ротора на другой ( рис. 1 ). Рабочий ротор представляет собой жёсткую систему, на которой монтируется группа орудий, равномерно расположенных вокруг общего вращающего систему вала. Необходимые рабочие движения сообщаются этим орудиям исполнительными органами; для малых усилий применяются механические исполнительные органы ( рис. 2 ), для больших - гидравлические (например, штоки гидравлических силовых цилиндров). Инструмент, как правило, монтируется комплектно в предварительно налаживаемых (вне рабочих машин) блоках, сопрягаемых с исполнительными органами ротора преимущественно только осевой связью, что обеспечивает возможность быстрой замены блоков. 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16, 17, 18, 19, 20, 21, 22, 23, 24, 25, 26, 27, 28, 29, 30, 31, 32, 33, 34, 35, 36, 37, 38 |
|||||||