 |
|
Популярные авторы:: Андерсон Пол Уильям :: Ламур Луис :: Кларк Артур Чарльз :: БСЭ :: Дойл Артур Конан :: Кукаркин Евгений :: Бондарев Юрий Васильевич :: Коллектив Рубоард :: Станюкович Константин Михайлович :: Ломер Кит Популярные книги:: Справочник по реестру Windows XP :: Принц убивший дракона :: Смерть Эльзы Басколет :: Согровища негуса :: Голоса в темноте :: Пришельцы из космоса :: «Простите нас!» :: Звездный удар :: Бурый волк :: Рабыня Гора |
Большая Советская Энциклопедия (ТЕ)ModernLib.Net / Энциклопедии / БСЭ / Большая Советская Энциклопедия (ТЕ) - Чтение (стр. 20)
Система может обслуживать до 32 контролируемых пунктов (КП; например, электрических подстанций), удалённых от пункта управления (ПУ) на расстояние до 14 000
км;информация передаётся по проводным линиям либо радиоканалам связи. На каждый КП может поступать до 80 сигналов телеизмерений (силы тока, напряжения, частоты и т. п.) и до 736 сигналов телесигнализации («включен такой-то блок», «под нагрузкой такая-то линия»). В случае большого объёма измерительной информации она обрабатывается на ЭВМ. Диспетчерский щит на ПУ Т. и т. с. имеет до 3000 индикаторов двоичных сигналов и до 256 цифровых измерительных приборов.
В. В. Наумченко. Телейтоспоры Телейтоспо'ры(от греч. teleutй - конец и ) ,один из видов спор (большей частью зимующих) у .Т. могут быть одно- и многоклеточные, на ножке или без ножки, свободные или срастающиеся в столбики или корочки и т. д. Этими признаками пользуются для разделения ржавчинных грибов на семейства и роды. Т. иногда называют также споры . Телекинопередатчик Телекинопереда'тчик,телекинопроектор, аппарат для передачи по телевидению изображений, зафиксированных на киноплёнке (кинофильмов). Состоит из лентопротяжного механизма и оптико-электронного считывающего устройства, преобразующего киноизображение в .Современные Т. позволяют вести как цветные, так и черно-белые передачи. Известны Т. с преобразованием светового изображения в видеосигнал в и Т. с развёрткой изображения бегущим световым пятном (см. ) .В первых изображение каждого кадра демонстрируемого фильма проецируется цветоделительной оптической системой (содержащей дихроические зеркала или призмы в сочетании со светофильтрами и позволяющей разделять световой поток на 3 цветовых составляющих - красную, зелёную и синюю) на светочувствительные элементы передающих трубок ( или ) .Во вторых считывание изображения с киноплёнки производится световым лучом, формируемым посредством проекции на плоскость киноплёнки светового пятна, которое создаётся на экране электроннолучевой трубки (проекционного кинескопа). Этот луч, проходя последовательно участки киноплёнки с различной оптической плотностью, модулируется (см. ) ,затем разделяется цветоделительной оптической системой на 3 составляющих луча, которые с помощью преобразуются в видеосигналы. После усиления видеосигналы преобразуются в полный . Разрабатываются также Т., в которых используются принципы развёртки передаваемого изображения комбинированным трёхцветным лазерным лучом (см. ) и преобразования светового сигнала в электрический с использованием растровых линеек с полупроводящими фоточувствительными элементами. Лит.:Тельнов Н. И.. Современная телекинопередающая аппаратура, «Техника кино и телевидения», 1972, № 11: Выходец А. В.. Телевизионная передача кинофильмов, М.. 1975. Н. И. Тельнов. Телекинопроектор Телекинопрое'ктор,то же, что . Телеконтроль Телеконтро'ль,контроль на расстоянии, осуществляемый средствами ;реализация процессов и (или) . Телекс Те'лекс,международная сеть .Объединяет (середина 70-х гг. 20 в.) около 100 национальных сетей, оборудованных автоматическими коммутационными станциями «Телекс» - декадно-шаговыми станциями с дисковым набором номера (см. ) .На международном участке сети Т. используются каналы и радиоканалы. В большинстве стран сеть Т. не выделяется из сети абонентского телеграфирования страны. Т. охватывает около 600 тысяч абонентов, из которых более половины находится в Европе. Телеман Георг Филипп Те'леман(Telemann) Георг Филипп (14.3.1681, Магдебург, - 25.6.1767, Гамбург). немецкий композитор, органист, капельмейстер. Музыкальными предметами занимался самостоятельно. С 1701 изучал право в Лейпцигском университете, где основал музыкальный кружок «Коллегиум музикум». В 1704 органист в Лейпциге. В 1704-08 капельмейстер при герцогском дворе в Зорау (ныне Жоры, ПНР). Важное значение для Т. имело посещение Кракова, где он познакомился с польской народной музыкой. В 1708-12 был придворным музыкантом в Эйзенахе (здесь встречался с И. С. Бахом), в 1712-1721 кантор и музик-директор в Франкфурте-на-Майне; с 1721 городской музик-директор Гамбурга, до конца жизни руководил церковными капеллами и оперным театром (сыграл большую роль в его деятельности), основал общество «Коллегиум музикум», с 1728 издавал нотный журнал «Der getreue Musicmeister». Т. работал в разных жанрах (около 40 опер, многочисленные духовные кантаты, оратории, пассионы, мессы, оркестровые увертюры, сюиты, кончерти гросси, произведения для клавира, скрипки, триосонаты и др.). Современник Баха и Г. Ф. Генделя, Т. в своём творчестве соединял свободное владение полифонией с чертами нового, так называемого галантного стиля 18 в., писал пьесы для домашнего музицирования. нередко обращался к программности (оркестровая сюита «Дон Кихот» и др.). Лит.:Роллан Р., Музыкальное путешествие в страну прошлого, Собр. соч., т. 17, Л., 1935, гл. 5; Рабей В., Георг Филипп Телеман, М., 1974. Телемах Телема'х,Телемак, в сын и ,сначала отправился на розыски отца, затем помогал ему в расправе с женихами, добивавшимися руки Пенелопы. Телеметрия Телеметри'я(от ...и... ) .то же, что .Термин «Т.» заимствован из иностранной литературы и традиционно употребляется применительно к дистанционным исследованиям биологических процессов и измерениям биологических показателей (см. ) ,а также к измерениям и передаче метеорологических данных с космических объектов (метеорологических ракет или искусственных спутников Земли) или с наземных автоматических метеостанций, находящихся в зонах относительной недоступности (см. ) .Информация от объектов, удалённых от пункта управления на большие расстояния, передаётся, как правило, по каналам ,в этом случае употребляют термин «радиотелеметрия» (см. ) . Телеметрия метеорологическая Телеметри'я метеорологи'ческая.Телеметрией (правильнее ) пользуются для получения метеорологической информации. Существует ряд информационных метеорологических телеметрических систем (ТМС), в основу которых положены общие принципы .Появление в 1930 положило начало развитию радиотелеметрических систем и широкому их применению для исследования верхних слоев атмосферы. Радио-ТМС температурно-ветрового распространены во всех странах мира. Др. разновидность ТМС - автоматические (АРМС). которые устанавливаются в труднодоступных районах (льды Арктики, высокогорные районы и т. п.). Первые АРМС были разработаны в СССР в начале 30-х гг. Наземные телеметрические метеорологические станции с проводными линиями связи (протяжённостью до 10 км) применяются в метеорологической сети, особенно на аэродромах; они появились в СССР в конце 50-х гг. Исследования верхних слоев атмосферы с помощью ракет были предприняты в США в начале 40-х гг., а в СССР систематическая работа радио-ТМС ракетного зондирования атмосферы началась с начала 50-х гг. Измерительно-передающая аппаратура поднимается с помощью ракеты на высоту более 100 кми при спуске на парашюте передаёт данные о состоянии атмосферы, которые принимаются наземной станцией. Важную роль играют радио-ТМС, установленные на ИСЗ. которые с помощью измерительно-передающей аппаратуры и приёмной аппаратуры на наземных станциях обеспечивают получение информации о состоянии поверхностей суши и океана, облачности, радиации атмосферы, суши и воды и о др. характеристиках в масштабах всей планеты. Лит.:Ильин В. А.. Телеуправление и телеизмерение, 2 изд., М.. 1974; Системы получения и передачи метеорологической информации, Л.. 1971; Вайсман Г. М.. Верле Ю. С.. Основы радиотехники и радиосистемы в гидрометеорологии, Л.. 1970; Автоматическая станция КРАМС. Л.. 1974; Разработка и эксплуатация автоматических метеорологических станций. Труды II Международного симпозиума, Л.. 1974. М. С. Стернзат. Телемеханика Телемеха'ника(от ...и ) ,область науки и техники, предметом которой является разработка методов и технических средств передачи и приёма информации (сигналов) с целью управления и контроля на расстоянии. Т. отличается от др. областей науки и техники, связанных с передачей информации на расстояние (телефония, телеграфия, телевидение и др.), рядом специфических особенностей, важнейшие из которых - передача очень медленно меняющихся данных; необходимость высокой точности передачи измеряемых величин (до 0,1%); недопустимость большого запаздывания сигналов; высокая надёжность передачи команд управления (вероятность возникновения ложной команды должна быть не более 10 -6-10 -10); высокая степень автоматизации процессов сбора и использования информации (Т. допускает участие человека в передаче данных только с одной стороны тракта передачи); централизованность переработки информации. Указанные особенности обусловлены спецификой задач, решаемых Т. Как правило, телемеханизация применяется тогда, когда необходимо и целесообразно объединить разобщённые или территориально рассредоточенные объекты управления в единый производственный комплекс (например, при управлении газо- и нефтепроводом, энергосистемой, ж. -д. узлом, сетью метеостанций) либо когда присутствие человека на объекте управления нежелательно (вследствие того, что работа на объекте сопряжена с риском для здоровья - например, в атомной промышленности, на некоторых химических предприятиях) или невозможно (из-за недоступности объекта управления - например, при управлении непилотируемой ракетой, луноходом). Методы и средства Т.Любой процесс управления включает собственно управление, то есть воздействие на объект с целью изменения его состояния (положения в пространстве, значений его параметров), и контроль за состоянием объекта. Управление и контроль с помощью средств Т. осуществляются обычно с пункта управления (ПУ) или (ДП), где находится оператор (диспетчер). Объекты управления могут быть сосредоточены в одном месте, на одном контролируемом (управляемом) пункте (КП) либо рассредоточены, то есть расположены по одному или группами (на нескольких КП) на большой территории (в пространстве). Расстояние между КП и ПУ может быть от нескольких десятков (например, при управлении строительным краном) до десятков и сотен тысяч км(например, при управлении автоматической межпланетной станцией). Для передачи телемеханической информации используют выделенные для этого линии связи (проводные и кабельные), радиоканалы, оптические, гидравлические и акустические каналы, распределительные электрические сети и линии электропередачи. Нередко телемеханическая информация передаётся по каналам, предназначенным для передачи др. сигналов - например, по телефонным каналам и каналам .В этом случае для телемеханических сигналов выделяют определённый диапазон частот канала или целиком незанятый телефонный или телеграфный канал. По одному стандартному телефонному каналу можно передавать управляющую информацию на десятки и даже сотни КП. При использовании выделенных проводных линий аппаратура КП обычно подключается параллельно к общей линии, структура которой может быть достаточно сложной (древовидной, кольцевой, кустовой и смешанной). Значительно реже (вследствие низкой надёжности) применяется цепочечное соединение линий связи и аппаратуры отдельного КП. Если для передачи телемеханической информации используют радиоканалы, то Т. называется .Совокупность устройств, посредством которых с помощью человека-оператора осуществляется управление объектами и контроль за их состоянием на расстоянии, называется (ТМС). Соответственно системы Т., выполняющие функции только управления и только контроля, называются системами (ТУ) и (ТК). Частично в телемеханической системе управляющие воздействия могут вырабатываться управляющим автоматом (например, для автоматического аварийного отключения оборудования, подключения нагрузок к энергосистеме, управления устройствами по заранее заданной программе и т. п.). При телеуправлении сложными объектами используются ЭВМ для обработки полученной контрольной информации, функционирующие в режиме «советчика». Такие телемеханические системы называются телеинформационными. Телемеханические системы, в которых управляющие воздействия вырабатываются полностью автоматически, называются телеавтоматическими системами управления. При ТУ команды управления передаются оператором (диспетчером) с ПУ или ДП по каналу связи на объекты (к КП). Команды формируются оператором на с помощью органов ручной коммутации (тумблеров, переключателей, кнопок). С ПУ в линию связи поступает кодированный сигнал, обычно в виде последовательности импульсов с определёнными признаками (см. в телемеханике). Из-за необходимости обеспечивать высокую надёжность передачи команд управления в ТУ применяются специфические методы кодирования, а также методы обнаружения и исправления ошибок с помощью квитирования сигналов (повторения сигналов по обратному каналу). При приёме кодовая посылка преобразуется в управляющее воздействие на соответствующий (например, в простейшем случае - на реле, включающее двигатель). При ТК информация передаётся в обратном направлении - от объекта (с КП) к оператору (на ПУ или ДП). Контрольная информация о состоянии объекта поступает обычно с (датчиков), реагирующих на изменения параметров объекта. Для удобства передачи такой информации используют кодирование и или только одну модуляцию, в том числе двух- и трёхкратную (например, двухкратную частотную, широтно-импульсную и затем частотную модуляцию). На ПУ после демодуляции и декодирования воспроизводят значение измеряемого параметра или отображают изменение состояния (положения) объекта управления. Сообщения, передаваемые системой ТК, обычно содержат информацию двух видов: сигнализирующую, дающую качественную оценку состояния как отдельных органов управления объекта («включено», «выключено», «открыто» и т. д.), так и объекта в целом («стоит», «движется», «вверху», «внизу» и др.), а также параметров, характеризующих объект («норма», «меньше нормы», «больше нормы», «авария» и др.), и измерительную, дающую количественную оценку контролируемого параметра (например, температуры, давления, напряжения в электрической цепи, угла поворота вала и т. д.). Поэтому и соответствующие процессы ТК называются (ТС) и (ТИ). Телеуправление и телеконтроль отличаются от дистанционного управления и дистанционного контроля тем, что все сигналы ТУ и ТК передаются по одной линии связи (существуют многопроводные системы Т., однако число проводов в них существенно меньше числа управляемых или контролируемых объектов). Эта особенность Т. позволяет осуществлять передачу информации на расстояние с меньшими материальными затратами, чем при дистанционном управлении. Большинство объектов управления - двухпозиционные; они могут находиться в одном из двух состояний (позиций), например во включенном или отключенном. Таковы, например, электродвигатели, осветительные приборы, ж. -д. стрелки. Поэтому и команды управления, как правило, имеют дискретный характер: «включить» - «отключить», «пуск» - «остановка» и т. д. Однако иногда оказывается необходимым плавное изменение управляемого параметра. В этом случае оператор посылает непрерывные сигналы управления и по поступающей от объекта измерительной информации координирует свои дальнейшие действия. Такой вид ТУ называется (ТР). Для чёткой, надёжной работы оператора необходимо переданную и принятую информацию представить в виде, наиболее удобном для восприятия её человеком. Для этого на ПУ используются различные сигнализаторы, индикаторы, устройства . Для обеспечения независимой передачи (и приёма) многих сигналов по одному каналу связи в Т. применяется так называемое разделение сигналов, при котором сигналы сохраняют индивидуальные свойства и не искажают друг друга. Из множества способов разделения сигналов (см. ) в Т. обычно применяется разделение по времени (каждому объекту отводится определённый интервал времени), по частоте (для каждого объекта устанавливается своя полоса частот), смешанное - частотно-временное (например, для КП - частотное, а для объектов в рамках одного КП - временное) и адресное (каждому КП присваивается адрес, и все сообщения обязательно начинаются с кода адреса выбранного КП). Теория Т. изучает вопросы формирования и преобразования телемеханических сигналов, передачи их по линиям связи с ограничивающей частот и при наличии помех, представления информации оператору и технической реализации ТМС. К основным проблемам Т. относятся проблемы повышения достоверности передачи информации, эффективного использования каналов связи и создания экономичной и надёжной аппаратуры. История Т. Области её применения.Первые попытки производить измерения и управлять работой машин на расстоянии относятся к концу 19 в.; термин «Т.» был предложен в 1905 французским учёным Э. Бранли. Первоначально с понятием Т. связывали представление об управлении по радио подвижными военными объектами. Известны случаи применения средств боевой техники, оснащенных устройствами управления на расстоянии, в 1-й мировой войне 1914-18. Практическое применение Т. в мирных целях началось в 20-х гг. 20 в. главным образом на ж.-д. транспорте: ТУ ж.-д. и стрелками было впервые осуществлено в 1927 на ж. д. в Огайо (США) на участке длиной 65 км.В 1930 в СССР был запущен первый в мире радиозонд с оборудованием для ТИ. В 1933 в Московской энергосистеме (Мосэнерго) введено в эксплуатацию первое устройство ТС. В 1935-36 началось практическое применение устройств Т. в Мосэнерго, Ленэнерго, Донбассэнерго. В 1935 реализовано ТУ стрелками и сигналами на Московско-Рязанской ж. д. В начале 40-х гг. в Москве было введено централизованное ТУ освещением улиц. Серийное заводское производство устройств Т. в СССР впервые было организовано в 1950 на заводе «Электропульт». К 1955 выявилась тенденция к техническому переоснащению средств Т.: ненадёжные релейно-контактные элементы начали с 1958 повсеместно заменять полупроводниковыми и магнитными бесконтактными элементами. Первая в СССР электронная система ТИ была разработана в 1955-56. В конце 60 - начале 70-х гг. началось оснащение ТМС аппаратурой с использованием . С каждым годом растет число оборудованных средствами Т. предприятий химической, атомной, металлургической, горнодобывающей промышленности, телемеханизированных электрических станций и подстанций, насосных и компрессорных станций (на нефте- и газопроводах, в системах ирригации и водоснабжения), ж.-д. узлов и аэропортов, усилительных и ретрансляционных установок на линиях связи, систем охранной сигнализации и т. д. Если в 30-х гг. в СССР число телемеханизированных объектов едва достигало нескольких десятков, а в 50-х гг. - нескольких десятков тысяч, то в середине 70-х гг. их стало свыше 500 тысяч. К 1975 в энергосистемах СССР находилось в эксплуатации свыше 5000 ТМС; телемеханизировано около 40 тысяч кмжелезных дорог; свыше 80% всей добываемой в стране нефти давали телемеханизированные скважины. Внедрение ТМС позволяет сократить численность обслуживающего персонала, уменьшает простои оборудования, освобождает человека от работы во вредных для здоровья условиях. Особое значение Т. приобретает в связи с созданием автоматизированных систем управления (АСУ). В СССР разработаны н успешно применяются (1976) такие системы Т., как, например, МКТ, «Стимул», ТМ-500, ТМ-511. ТМ-512 (для ТУ энергетическими установками на электростанциях и промышленных предприятиях, для управления энергосистемами и энергообъединениями); ТМ-100, ТМ-120-1, ТМ-600, ТМ-625 (для централизованного ТУ газо- и нефтепроводами, линиями электропередачи, различными объектами на нефтепромыслах и транспорте); ТМ-300, ТМ-310, ТМ-320 (для телемеханизации промышленных предприятий); ЭСТ-62, «Лиспа» (для телемеханизации оборудования систем электроснабжения ж. д.); ЧДЦ, «Нива» (для диспетчерской службы на ж. д.) и др. Интенсивно ведутся разработка и внедрение самых разнообразных систем Т. и информационных систем с устройствами Т. за рубежом. Во Франции, например, созданы и успешно эксплуатируются ТМС: «Марафон IV», ТМСС, ТТ-40, ТТ-3000, «Редека», «Телефонта», «Консип», «Телесиль»; в Щвейцарии - ДАСА, «Телегир 505», «Телегир 707», ЦУТ, ДФМ, ДУФА; в Бельгии - «Дижитл 140», «Дижитл 1000», ТС-СЛ; в ФРГ - «Геатранс» (Ф-101, Ф-102, Ф-200), ЕФД; в Великобритании - ДТ-3, «Телеплекс», «Серк»; в Италии - ТЛСМ-30, Р-6006, STO-3400; в США-«Бристоль», DS-3500, «Систем-9000», «Дейтлок-7» и др. Огромную роль играет Т. в освоении космоса. Применение Т. - одно из важнейших условий успешного запуска искусственных спутников Земли, космических кораблей с человеком на борту, автоматических межпланетных станций и луноходов. Устройства Т. передают с космических объектов на пункты управления данные о работе бортовых систем, необходимую измерительную информацию, в том числе сведения о состоянии здоровья космонавтов (см. ) ;с помощью устройств Т. осуществляется управление этими объектами с Земли. Применительно к авиации, ракетной технике и космическим кораблям телеуправление и телеизмерения получили название радиоуправление и радиотелеметрия. Лит.:Шастова Г. А., Кодирование и помехоустойчивость передачи телемеханической информации, М.- Л., 1966: Бесконтактные элементы промышленной телемеханики, М., 1973; Тутевич В. Н., Телемеханика, М., 1973; Ильин В. А., Телеуправление и телеизмерение, 2 изд., М., 1974; Макаров В. А., Теоретические основы телемеханики, Л., 1974; Фремке А. В., Телеизмерения, 2 изд., М., 1975. Г. А. Шастова. Телемеханическая система Телемехани'ческая систе'ма,система телемеханики, комплекс технических средств для передачи на расстояние по каналам радиосвязи или проводным линиям связи команд от оператора или управляющей вычислительной машины к объектам управления, а также контрольной информации в обратном направлении (см. ) .Т. с. включает пункт управления (ПУ), где находится оператор (диспетчер), один или несколько контролируемых пунктов (КП), где располагаются объекты управления (контроля), и линии связи (каналы передачи данных), соединяющие ПУ с КП. В сложных Т. с. может быть несколько ПУ - равноправных либо подчинённых Друг другу в соответствии с иерархическим принципом. Различают Т. с. для сосредоточенных объектов (находящихся в пределах одного КП; рис. а ) и Т с. для рассредоточенных объектов (расположенных группами на нескольких КП либо рассеянных по одному на большой территории; рис. б , в ) .Пример Т. с. первого вида - система управления отдельным строительным краном, самолётом, насосной станцией и т. д. Характерные примеры Т. с. второго вида - системы управления газо- и нефтепроводами, энергосистемами, ж. -д. узлами, шахтами и заводами, где управление осуществляется с одного . В Т. с. информация о состоянии и параметрах объектов управления, поступающая на ПУ, обычно воспринимается человеком-оператором, который на основании полученных данных принимает решения и подаёт команды управления. На ПУ имеется ,оснащенный соответствующими устройствами представления контрольной информации, и с органами управления телемеханической аппаратурой (с кнопками, ключами, тумблерами и т. п.) и устройствами формирования сигналов управления объектами. При больших объёмах информации её обработка и преобразование к виду, наиболее удобному для принятия решений оператором, производятся автоматическими устройствами или ЭВМ. В Т. с. могут передаваться все или только некоторые виды контрольной и управляющей информации. При передаче информации лишь о значениях параметров объектов Т. с. называется системой (ТИ); в системе (ТС) передаётся преимущественно информация о том, в каком из возможных состояний (обычно из двух) находится контролируемый объект; в системе (ТУ) передаются только команды управления. В комбинированных Т. с. осуществляется передача информации нескольких видов, например измерительной и сигнализирующей (ТИ-ТС), управляющей и сигнализирующей (ТУ- ТС). В комплексных Т. с. возможна передача контрольной и управляющей информации всех видов (ТУ - ТС - ТИ). Основные характеристики Т. с.: набор выполняемых функций и видов информации, тип расположения объектов, дальность действия, число обслуживаемых объектов, быстродействие, достоверность передачи информации, надёжность, структура и тип каналов связи. Аппаратура Т. с. в простейшем случае состоит из передающего и приёмного полукомплектов, с помощью которых осуществляется передача телемеханической информации. Т. с. часто включают в себя автоматические устройства (например, для циклического опроса объектов, передачи команд по заданной программе, сравнения текущих значений контролируемых параметров с заданными, диагностики повреждений), облегчающие работу оператора или повышающие надёжность и эффективность передачи информации по каналу связи. Т. с. - сложный технический комплекс, в состав которого входят разнообразные устройства и приборы, насчитывающие десятки и сотни тысяч различных элементов. В начальный период развития телемеханики (начало 20 в.) аппаратура Т. с. была преимущественно релейно-контактной; в 50-х гг. 20 в. релейно-контактная аппаратура была вытеснена бесконтактными элементами (магнитными, полупроводниковыми и др.); в 70-х гг. происходит переход на микроэлектронные элементы и агрегатный метод построения Т. с. Так, разработанная в СССР агрегатная система средств телемеханики (АССТ) представляет собой набор унифицированных функциональных блоков, выполненных на ,и ряд телемеханических устройств, построенных из этих блоков. АССТ входит в Государственную систему промышленных приборов и средств автоматизации - .
Лит.см. при ст. . В. В. Наумченко. 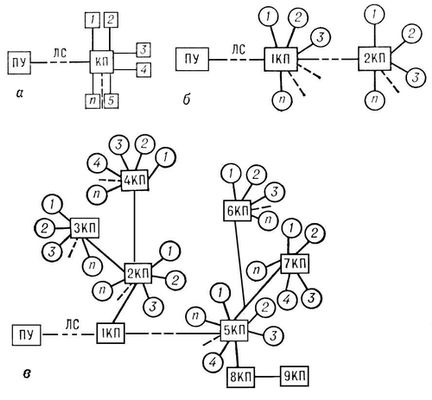
Структурная схема телемеханической системы: а - для сосредоточенных объектов; б, в - для рассредоточенных объектов (цепочечная и древовидная); ПУ - пункт управления (диспетчерский пункт); КП - контролируемый пункт; ЛС - линия связи; 1, 2, 3,..., n - объекты управления (контроля). Теленешты Телене'шты,посёлок городского типа, центр Теленештского района Молдавской ССР. Расположен в 30 кмот ж.-д. станции Калараш (на линии Бендеры - Унгены) и в 45 кмк Ю.-В. от г. Бельцы. 7 тыс. жителей (1975). Предприятия пищевой и лёгкой промышленности. Теленка Теле'нка,открытая без игровых отверстий, из орешника или ивы. Длина 600-650 мм.Распространена в Западной Украине, главным образом среди гуцулов. Теленомусы Телено'мусы(Telenomus), род перепончатокрылых насекомых из семейства Scelionidae; наездники-яйцееды. Размеры 0,7- 1,5 мм,цвет чёрный. Паразитируют в яйцах бабочек, клопов и мух. Обычно в яйце хозяина развивается один паразит; иногда (Т. fariai и Т. gracilis) от 6 до 16. Развитие длится от 2 неддо 1,5 мес;некоторые виды дают до 10 поколений в год. В естественных условиях - одни из основных регуляторов численности многих вредных насекомых. Т. разводят в лабораториях для биологической борьбы с вредителями. В СССР Т. sokolovi используют для борьбы с вредной черепашкой, Т. gracilis - с сибирским шелкопрядом, Т. laeviusculus - с кольчатым шелкопрядом; в США Т. emersoni применяют для борьбы со слепнями. В старой литературе под названием «Т.» даются виды рода Asolcus - паразиты яиц вредной черепашки. Лит.:Химическая и биологическая защита растений, М., 1971, с. 133. Г. М. Длусский. 
Telenomus gracilis. Телеобъектив Телеобъекти'в,длиннофокусный фотографический ,в котором расстояние от поверхности первой линзы до задней фокальной плоскости уменьшено по сравнению с длиннофокусными объективами др. типов, что позволяет сократить габариты фото- и кинокамер. Т. обычно применяют при съёмке удалённых объектов в крупном масштабе, а также при портретной съёмке. Наиболее употребительны двухкомпонентные схемы построения Т. ( рис. ). Каждая компонента представляет собой группу линз; первая из них положительна, вторая - отрицательна (см. ) .Компоненты сочетают так, чтобы вынести вперёд, за пределы объектива, заднюю главную плоскость H'(см. оптической системы) и укоротить расстояние L.Показатель укорочения К т= L/f’.В некоторых Т. фокусное расстояние последней группы линз положительно и К тмало отличается от единицы. Такие Т. рассматривают как трёхгрупповые системы линз. 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16, 17, 18, 19, 20, 21, 22, 23, 24, 25, 26, 27, 28, 29, 30, 31, 32, 33, 34, 35, 36, 37, 38, 39, 40, 41, 42, 43, 44, 45, 46, 47, 48, 49, 50, 51, 52, 53, 54, 55, 56, 57, 58, 59, 60, 61, 62, 63, 64, 65 |
|||||||