 |
|
Популярные авторы:: Чехов Антон Павлович :: Горький Максим :: Азимов Айзек :: БСЭ :: Раззаков Федор :: Толстой Лев Николаевич :: Борхес Хорхе Луис :: Лондон Джек :: Коллектив Рубоард :: Кларк Артур Чарльз Популярные книги:: Справочник по реестру Windows XP :: На страже :: Лунный нетопырь :: Брат мой... :: Сон Педро Энрикеса Уреньи :: Чужое :: Патруль :: Бурый волк :: Посланники хаоса-1: Проверка на прочность :: Не тяни леопарда за хвост |
Занимательная анатомия роботовModernLib.Net / Технические науки / Мацкевич Вадим Викторович / Занимательная анатомия роботов - Чтение (стр. 1)
Занимательная анатомия роботов ВВЕДЕНИЕ. РОБОТЫ — ПОМОЩНИКИ ЧЕЛОВЕКА Как только не называют нынешнее столетие — «атомный век», «космический век», «век электроники». С не меньшим основанием можно назвать его веком роботов. Ещё совсем недавно эти устройства существовали лишь на страницах научно — фантастических книг. Сегодня на многих наших предприятиях роботы активно помогают человеку в его нелёгком труде. В СССР создана новая отрасль машиностроения — промышленная робототехника. На предприятиях страны сейчас действуют тысячи роботов, а уже к концу 1987 года их количество вырастет до десятков тысяч. Партия и правительство уделяют огромное внимание созданию роботов и их внедрению в производство. Почему это так важно? Дело в том, что роботы освобождают людей от монотонного неинтересного труда, принимая его на свои железные плечи. Но облегчение труда людей — не единственная «заслуга» роботов. Применение роботов увеличивает производительность труда в 2-3 раза. Внедрение одного робота способно дать экономический эффект от 8 до 12 тыс. рублей в год. Важным фактором развития нашего социалистического государства является максимальное использование достижений науки и техники. Научно — техническая революция и социальный прогресс играют все большую роль в повседневной жизни миллионов советских людей. Постоянно совершенствуются техника и производство. Сейчас широкое применение промышленных роботов поставлено на первое место среди актуальных народнохозяйственных проблем, связанных с внедрением достижений науки в практику. Решение этой грандиозной задачи идёт полным ходом. Роботы уже «зачислены в штат» московских заводов ЗИЛ и «Динамо», они работают на Западно — Сибирском металлургическом заводе, Петродворцовом часовом заводе, на многих предприятиях приборостроения и электронной техники. В недалёком будущем будут созданы целые заводы, где на всех работах, начиная от проектирования и планирования производства и кончая упаковкой готовой продукции, будут заняты роботы. Кстати, такие автоматизированные производства становятся фактом сегодняшнего дня: уже выдают продукцию полностью автоматизированные цехи — например, на Днепропетровском электровозостроительном заводе. Что же, кроме облегчения условий труда, приобретёт человек, переложив часть своих обязанностей на плечи роботов? Очень многое. Прежде всего применение современных автоматических манипуляторов, в полном смысле слова «думающих», «самообучающихся» машин, даёт возможность быстро перестраивать производство на выпуск новой продукции. Использование роботов открывает перспективы создания принципиально новых технологических процессов, в которых невозможно непосредственное участие человека. Например, человек при стоградусной жаре или, скажем, в условиях сильной радиации работать не может, а робот — пожалуйста. Комплексное применение промышленных роботов уже сегодня позволяет повысить производительность труда в 1,5 — 2 раза, почти в 2 раза — сменность работы оборудования и, между прочим, существенно улучшает общую культуру производства. И наконец — фактор социальный. Роботы возьмут на себя практически весь неквалифицированный труд. Они заменят человека на тяжёлой, опасной, монотонной, малоинтересной работе, а человек, став квалифицированным оператором, будет ими управлять, обучать их и настраивать. Роботу не требуется жильё, столовая, транспорт, чтобы добраться до работы, он не простужается, не уходит в отпуск… Словом, очень многое, что необходимо человеку, роботу не нужно. Ему нужен человек, хорошо его знающий и умеющий им управлять. Молодой отрасли производства необходимы молодые руки. Не случайно XIX съезд ВЛКСМ в своей резолюции записал слова о шефстве комсомола над созданием робототехники. Нужны грамотные, высококвалифицированные инженеры, техники, рабочие. Нужен качественно новый уровень подготовки операторов. Сейчас специалистов по робототехнике начали готовить в очень многих технических вузах страны. Роботы все увереннее входят в нашу жизнь. К встрече с ними нужно готовиться, нужно научиться ими пользоваться. Они — уже реальность, но очень часто в них воплощаются новые, фантастические идеи. И естественно, мы не можем не интересоваться такими машинами независимо от того, какую профессию намерены избрать в будущем. Пытливый ум ищет ответы на десятки вопросов при встрече с любой машиной, будь то простые часы — ходики или мощная ракета. Роботы же вызывают особый интерес. Как они устроены? Как работают? Действительно ли они способны заменять человека? Можно ли своими руками построить робот или хотя бы его модель? Последний вопрос особенно волнует юных любителей техники, пытливых и любознательных энтузиастов, тех, кто сам с увлечением изобретает, конструирует, собирает. Кажется, где уж разобраться и справиться со всеми сложностями школьнику, не имеющему ещё даже законченного среднего образования! Но чем раньше наши будущие конструкторы «разумных» машин овладеют азбукой роботостроения на самых простейших моделях, тем больше они сделают в будущем. Жизнь показывает, что создание многих элементов роботов и их моделей вполне доступно школьникам. Немало юных энтузиастов в разных концах нашей страны уже занимаются этим интересным делом. Помочь им — наша задача. Подробнее о том, что такое роботы, как и где они используются, можно узнать из многих книг об этих разумных машинах. Их написано немало, и некоторые из них указаны в списке литературы, приведённом в конце этой книжки. В.И. Ленин говорил: «Нужно всюду больше вводить машин, переходить к применению машинной техники возможно шире». Сбываются мечты великого вождя трудящихся! Роботы быстро проникают во все сферы повседневной деятельности: транспорт, сельское хозяйство, медицину, многие области науки. Очень скоро они придут и в наш быт, в наш дом. Чтобы сделать их своими друзьями, нужно знать их. 1. «ЖИВЫЕ» МАШИНЫ НАСТУПАЮТ «Робот» — так назвал чешский писатель Карел Чапек в 1920 году придуманное им человекоподобное существо, персонаж пьесы «RUR» («Рос-сумские универсальные роботы»). Один из героев пьесы, генеральный директор компании «РУР», отвечая на вопрос, что такое роботы, говорит: «Роботы — это не люди… они механически совершеннее нас, они обладают невероятно сильным интеллектом, но у них нет души». Так впервые появилось новое понятие «робот», которое вскоре из фантастической литературы перешло в науку и технику. В пьесе «РУР» роботы, первоначально созданные для замены людей на заводах, вскоре вышли из — под контроля людей и принялись уничтожать своих создателей. Так К. Чапек иллюстрирует мысль о том, что техника может приносить человечеству пользу, только находясь в честных, добрых руках. Дискуссии вокруг робота и его искусственного интеллекта, показывают, что люди понимают опасность, которую таят в себе роботы, служащие силам зла. Передовые учёные и инженеры учитывают это в своей работе. Идея создания механических человекоподобных существ имеет весьма почтенный возраст. В одном из древнегреческих мифов говорится о страже царя острова Крит Миноса — медном великане Талосе, созданном по образу и подобию человека. Известен античный миф о Пигмалионе, изваявшем статую и оживившем её. Вспомните средневековые мечты о гомункулу сё — искусственном человеке, сказания о глиняном великане Големе.. В начале прошлого века писательница Мэри Шелли написала роман «Франкенштейн». В романе Виктор Франкенштейн, гениальный учёный, создал из неживой материи живое существо, подобное человеку Чудовище, поначалу желавшее людям добра, вышло из повиновения, и жестокий бесчеловечный мир сделал его преступником. Фантастические образы и идеи К. Чапека во многом предвосхитили создание универсального автомата, снабжённого механической рукой, который получил броское название «промышленный робот». В Советском Союзе робототехника зародилась в 50-х годах нынешнего столетия. В ту пору в нашей стране началась разработка промышленных роботов или, как их часто называют, автоматических манипуляторов. Роботов конструируют и в научных организациях, и в школьных технических кружках. Первый советский робот «В2М» (рис. 1) был создан в 1936 году автором этой книги. В 1937 году этот робот стал экспонатом Всемирной выставки в Париже. Конечно, это было только начало. За последующие десятилетия советские роботостроители создали немало интересных моделей, получивших высокую оценку. Упомянем о некоторых конструкциях. 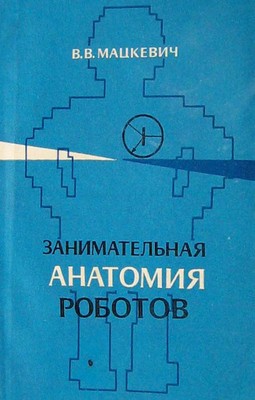 Рис. 1 Первый советский робот. Рис. 2 Робот — гигант выполненный на «В2М» СЮТ г Щегково Московской области На станции юных техников (СЮТ) г. Щёлково Московской области в 1969 году ребята создали кибернетический робот-гигант (рис. 2), успешно экспонировавшийся на Всемирной выставке «ЭКСПО — 70» в Японии. Робот — секретарь, разработанный в Калуге, по заданной программе включает и выключает освещение, поддерживает постоянную температуру в квартире. В указанное время он включает приёмник или телевизор. Утром будит хозяина, включая магнитофон с записью текста утренней гимнастики. Когда хозяина нет дома, робот отвечает на телефонные звонки, а если надо — записывает сообщение на магнитофонную ленту. О конструкции этих роботов и многих других любительских моделей пойдёт речь впереди. «МЕХАНИЧЕСКИЕ РУКИ» История механических рук начинается с… атомной физики. Дело в том, что многие материалы, с которыми приходится иметь дело в этой области науки, обладают радиоактивностью — свойством выделять в окружающее пространство опасные для здоровья человека лучи. Механические руки стали устанавливать там, куда доступ человека нежелателен, а сам он, управляющий руками, располагался в другом, безопасном помещении. Можно сказать, что в этих копирующих манипуляторах была использована та же идея, что и в известных всем куклах — марионетках (рис. 3). Оператор, работающий на манипуляторе, рукой приводит в движение управляющий механизм, звенья которого соединены с соответствующими звеньями исполнительного механизма, повторяющего все движения руки оператора. При работе с радиоактивными веществами расстоянии от оператора до исполнительных рук манипулятора может доходить до десятков метров, при работах в подводном мире — до тысяч метров. При применении манипуляторов в космическом пространстве это расстояние будет измеряться сотнями тысяч, миллионами километров… Надёжное и точное управление на значительном расстоянии — вот первое требование, которое предъявляют к любой конструкции копирующего манипулятора. Первое, но не единственное.  Рис. 3. Кукла — марионетка РОБОТ ТИПА «РУКА» Каждый робот рассчитан на выполнение той или иной работы, которая и определяет его конструкцию, размеры, степень подвижности, число рук и пальцев на руке, грузоподъёмность, точность движения и т.д. Независимо от того, стоит ли робот возле станков, передвигается между ними или ползает под потолком, у него всегда есть мощная механическая рука с двумя или четырьмя пальцами. Роботы отличаются один от другого общим видом, габаритами и техническими характеристиками, но у них есть и общие признаки. На рис. 4 изображена структурная схема такого робота. Рукой управляет либо оператор с пульта, либо мозг робота — его ЦВМ (цифровая вычислительная машина). В блоке памяти находится программа действий робота, которую вводят в него или которую он приобретает во время обучения. Общий блок управления электрическими, гидравлическими или пневматическими двигателями, расположенными в плече руки, предплечье, в кисти, состоит из цепей управления движением руки по каждой из координатных осей. Сколько степеней свободы у руки, столько и цепей управления. Робот — манипулятор, встав на рабочее место, согласовывает свою работу с обслуживаемым технологическим оборудованием. Движения руки точные, повороты строго рассчитаны во времени. Робот с оборудованием образует автоматизированную ячейку. Из таких ячеек составляют робототехнологические комплексы или линии. Одно из наиболее распространённых занятий роботов — манипуляторов — окраска изделий. 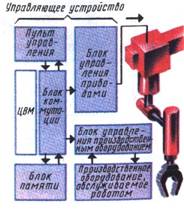 Рис. 4. Структурная схема робота. Окрашивают обычно способом набрызгивания. Чтобы защититься от вредного действия распыляемой краски, приходится работать в специальной маске, а рабочую зону оборудовать специальными защитными устройствами. Это сложно, дорого и все равно небезвредно для человека. Если же окраску изделий поручить манипулятору, а управление им человеку, это оздоровит условия работы и повысит производительность труда. Процессы формовки кирпича обычно высокомеханизированы. За формовкой следуют операции пропаривания, обжига, требующие перекладывания кирпича и складывания его в пирамиды определённой конфигурации. Эти операции также можно механизировать и автоматизировать, используя манипуляторы. Механическая рука может брать одновременно 5-6 и более кирпичей, каждый из которых весит до 4 кг, и не боится обжечься, даже если они только что из печи. Стеклянные заготовки для телевизионного кинескопа могут весить 10-15 кг. Сложный технологический процесс их изготовления требует многократной установки, съёма, погрузки. Сотни людей были заняты этой малопроизводительной работой, но им на смену пришли механические руки. Эти несколько скупых примеров ясно свидетельствуют о том, как широко поле деятельности, открывающееся перед автоматическими манипуляторами в самых различных областях производства. РОБОТЫ ПЕРВОГО ПОКОЛЕНИЯ — ОБУЧАЕМЫЕ МАНИПУЛЯТОРЫ Каждый промышленный робот — манипулятор состоит из двух основных частей: манипулятора и устройства управления. Первая отвечает за все необходимые движения, вторая — за управление ими. Описывая конструктивную компоновку робота для промышленности, трудно удержаться от сравнения его с «конструкцией» человека. Каждый промышленный робот имеет мозг — блок управления и механическую часть, включающую тело и руку. Тело робота — это, как правило, массивное основание или, как его называют, станина, а рука — многозвенный рычажный механизм — манипулятор. Чтобы рука могла совершать положенное ей многообразие движений, она имеет мышцы — привод. Задача мышц — преобразовывать сигналы блока управления в механические перемещения руки. Венчает механическую руку кисть или захватное устройство — схват. Большинство промышленных роботов имеет одну руку, но существуют и роботы, обладающие двумя, тремя и более руками. Взглянув на руки промышленного робота, почти любой человек, даже не обладающий проницательностью Шерлока Холмса, сможет, немного подумав, определить сферу «профессиональных интересов» робота. Вот клешни из трёх крюков для круглых поковок, вот присоски, как у осьминога, для стеклянных листов, вот ковш для сыпучих материалов, и т.д. и т.п. Ещё проще разобраться в обязанностях робота, если руки его снабжены специализированным инструментом: сверлом, краскораспылителем, гайковёртом и др. Инструмент закреплён прямо на руке, а не в схвате, теперь уже ненужном.  Рис. 5 «Мягкий схват» робота — мaниnулятора для работы с хрупкими cmeклянными изделиями На выставке НТТМ-82 можно было видеть роботы, искусно манипулирующие электролампами (рис. 5). Кроме прочих весьма привлекательных достоинств один из роботов имел хитроумный захват в виде резиновых гофрированных хоботков. Когда в кисть подавали воздух, хоботки, раздуваясь, изгибались и захватывали лампу за тонкостенную стеклянную колбу с деликатной осторожностью, но прочно. Массу нежных присосок — пальцев используют для манипуляции мягкими изделиями, например шоколадными конфетами или диетическими яйцами. Различают руки роботов и по размерам: есть экземпляры рук для работы с многотонными валами, а есть миниатюрнейшие щипчики — пинцетики для изделий микроэлектроники или часовых шестерёнок. Некоторые пальчики — усики манипулируют деталями, различимыми лишь в микроскоп. РОБОТЫ НА УКЛАДКЕ ГОТОВОЙ ПРОДУКЦИИ На многих предприятиях готовая продукция сходит с конвейера упакованной в ящики массой до 20…30 кг. 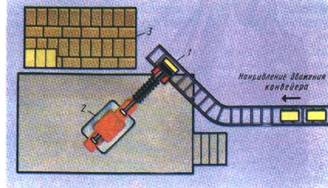 Рис. 6. Робот фирмы «Ретаб» для укладки ящиков. 1) конвейер готовой продукции 2) робот укладки 3) платформа транспортировки готовой продукции Человеку приходится непрерывно снимать с ленты эти тяжёлые ящики и укладывать их на платформы или в контейнеры для отправки потребителю. Так, например, человек снимает с конвейера и укладывает ящики с бутылками минеральной воды, молока или сока. Не очень-то приятный труд! А роботу такую работу только подавай. Очень удачного промышленного робота (рис. 6) для укладки ящиков в штабеля сложной конфигурации ещё в 1970 году создала шведская фирма «Ретаб». Поскольку в этом случае роботу приходится задумываться, куда класть очередной ящик, им управляет специальная электронная система с памятью большой ёмкости. КОСМИЧЕСКИЕ РОБОТЫ В 1822 году великий английский поэт Дж. Байрон писал в своей поэме «Дон Жуан»: «Уж скоро мы, природы властелины, и на Луну пошлём свои машины»… Гениальное пророчество Дж. Байрона сбылось уже во второй половине XX века. Мы являемся очевидцами невиданного штурма космического пространства, в котором участвуют и роботы. 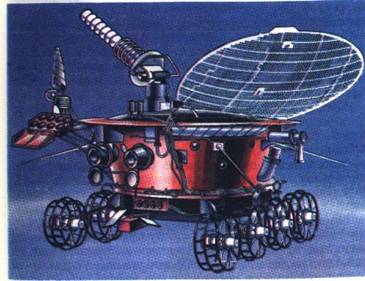 Рис. 7 Робот «Луноход-1» Первым роботом-лунопроходцем стал телеуправляемый советский аппарат «Луноход — 1» (рис. 7). 17 ноября 1970 года автоматическая станция «Луна — 17» совершила мягкую посадку на поверхность Луны в районе Моря Дождей. «Луноход — 1», установленный на посадочной ступени этой станции, по команде с Земли съехал на поверхность Луны и приступил к выполнению программы исследований. Его экипаж жил и работал на Земле в привычных условиях и вместе с тем неделя за неделей, месяц за месяцем «объезжал» намеченные участки лунной поверхности, останавливаясь в случае необходимости на долгое время. Эти остановки не оборачивались для экипажа изнурительным бездельем и не требовали особых мер для его жизнеобеспечения — у автоматических и телеуправляемых аппаратов уже сейчас есть ряд существенных преимуществ по сравнению с обитаемыми. РОБОТЫ В СЕЛЬСКОМ ХОЗЯЙСТВЕ Трудно представить, как, например, станет какой — то металлический шкаф «ухаживать» за живой коровой. Всё-таки ферма не цех, где роботу достаточно выполнять заданный набор механических движений. Тут будут рядом с ним беспокойные животные со своими нравом, привычками, капризами. Чтобы к ним приноровиться, нужна ещё и элементарная сообразительность, а у нашего робота даже головы нет. На месте её в верхней части шкафа поблёскивают линзы телеобъективов. Конструкторам роботов для сельского хозяйства пришлось немало сил отдать сельскохозяйственной подготовке, изучить нрав животных, их физиологию и биомеханику. Они с секундомером следили за скоростью передвижения свиньи и коровы, узнавали, как далеко они могут отставлять ногу вперёд и в сторону, определяли, с какой силой нужно брать в руки поросёнка или телёнка, чтобы не причинить ему вреда. Но вот робот появился на свет. И начались новые проблемы: оказалось, что все предусмотреть заранее было просто невозможно. В первый же «выход в свет» на объектив телекамеры — глаз робота — села муха, и он «ослеп». Пришлось предусмотреть устройство, имитирующее действие человеческого века. Когда робота впервые ввели в загон к свиньям, они сразу отгрызли у него резиновые части кистей рук. Видимо, животных чем-то привлёк их запах. Значит, следовало придумать что-то, выделяющее защитный аромат. Уже разработаны принципы построения роботов и робототехнических комплексов для разных отраслей сельского хозяйства: растениеводства, хлопководства, овощеводства и др. Есть проекты роботов для технического обслуживания и малого ремонта автотракторной техники, например проект робота — заправщика. Двадцать четыре модификации позволили бы заменить весь парк машин и механизмов, который сейчас занят в сельском хозяйстве страны. РОБОТЫ В БЫТУ Робототехнические устройства используют в самых различных и неожиданных областях. Они управляют игрой света в театрах по специальной программе, записанной на магнитной ленте, внедряются в сферу исследования спортивного снаряжения, разрабатывая, например, рекомендации по технике нанесения ударов теннисной ракеткой по мячу, позволяют составлять портрет человека при розыске преступника. В последнем случае имеется в виду не традиционный фоторобот. Портрет составляют телевизионная камера и «миксер», обеспечивающие появление отдельных элементов лица. А взгляните на торговые автоматы. Если это и не роботы, то, во всяком случае, их ближайшие родственники. Такие автоматы, проглотив монету, отмеряют точную порцию подсолнечного масла либо выдают газету. Они могут разменивать деньги и продавать железнодорожные билеты. Самый простой разменный аппарат — прежде всего строгий контролёр и испытатель. В конструкцию аппарата входят механические и электромагнитные испытатели монет. Все испытание длится около двух секунд. Нужно не забывать, что роботы — это машины, призванные служить человеку. Поэтому естественно желание человека возложить на них и такие домашние работы, которые мало кто выполняет с радостью и удовольствием: стирку, глажение, уборку, мытьё окон. Хорошо бы иметь такого роботизированного «домового». Различные предприятия уже разрабатывают бытовые робототехнические устройства. Среди них автоматические стиральные машины с набором программ, машины для мытья и сушки посуды. Издавна музыканты, играющие в оркестре, сталкиваются, казалось бы, с простой, но трудноразрешимой проблемой: как переворачивать страницы нот, не прерывая игры? Своеобразное решение этой каверзной проблемы на самом современном уровне предложила группа швейцарских изобретателей. Они создали для этой цели маленький робот, который выполняет функцию третьей руки музыканта и по его приказу переворачивает страницу — необходимо лишь нажать ногой педаль. В фантастическом рассказе Рэя Брэдбери «Судебный процесс» шла речь о том, что фирма, занимающаяся протезированием, допротезировалась до того, что в её клиенте, известном гонщике, уже не осталось ни одной «живой части», и так как он не оплатил в срок задолженность, фирма заявила, что он теперь является её собственностью. «Полноразмерные» копии человека, созданные в настоящее время за рубежом, ведут себя совершенно «естественно». С. Мицуно, 44-летний японский художник и изобретатель, создал десять кукол — роботов, среди них «Томас Эдисон» и «Мэрилин Монро». Изготовлением роботов С. Мицуно начал заниматься в 60 — х годах, когда японская электроника переживала бум. В ту пору уже существовали радиороботы. Но, по его мнению, они были «слишком медлительны и примитивны». С. Мицуно решил сконструировать своего робота, и через восемь лет появился «Томас Эдисон». Больше всего времени, как ни странно, потребовалось для создания искусственной кожи, которая по замыслу автора не должна была внешне отличаться от человеческой. С. Мицуно занялся химией и наконец получил мягкую, эластичную кожу из винила, которую он запатентовал. Внутри «Мэрилин Монро» действует 80 электромагнитов. «Именно столько мускулов занято в движениях живого человеческого тела и лица, которые кукла имитирует», — поясняет С. Мицуно. Разумеется, до человеческого подобия этим игрушкам ещё далеко, однако программируемость на ту или иную «манеру поведения» позволяет вполне оправданно относить их к роботам первого поколения. Совсем другое дело — кибер, разработанный группой исследователей одной из токийских лабораторий робототехники. Это человекоподобный робот с руками, ногами, зрительным, слуховым и речевым аппаратом, и обладающий интеллектуальными способностями на уровне двух — трёхлетнего ребёнка. Он может, в частности, выполнить просьбу отыскать что — либо в помещении и принести, а также отвечать на вопросы. РОБОТЫ — ОБЪЕКТЫ ПОВЫШЕННОЙ ОПАСНОСТИ Робот — помощник человека, но слепо доверяться ему нельзя (рис. 8). Те промышленные роботы, которые сейчас трудятся на заводах и фабриках, пока ещё недостаточно сообразительны. Представим, что на линии сборки автомобилей случается какой — нибудь «перекос». Автоматы этой ошибки не замечают. Их настроили на то, чтобы сверлить отверстия в дверце, а они сверлят теперь в баке для горючего. Неправильная установка изделия их не волнует. Кроме того, иногда в их электронном блоке происходит какой — нибудь сбой, и тогда автомат в «слепой ярости» начинает колотить своей мощной стальной лапой по чему попало (так случилось недавно в Японии, когда роботом был убит рабочий). Робот, скажем, как и автомобиль или самолёт, является объектом повышенной опасности. Поэтому для большей гарантии безопасности человека, взаимодействующего с роботом, желательно, чтобы в программу поведения робота была заложена определённая осмотрительность, забота о безопасности человека. Говоря о взаимодействии человека и робота, уместно вспомнить о трёх законах системы «человек — робот», сформулированных американским писателем — фантастом и учёным А. Азимовым: 1. Робот не должен своим действием или бездействием причинять вред человеку. 2. Робот должен повиноваться командам, которые ему даёт человек, кроме тех случаев, когда эти команды противоречат первому закону. 3. Робот должен заботиться о своей безопасности, поскольку это не противоречит первому и второму законам.  Рис. 8 Робот объект повышенной опасности Эти законы, по мысли Азимова, должны полностью гарантировать безопасность четовека в системе «человек — робот» Создать роботов, т гя которых эти законы были бы непреложны, наша задача РОБОТЫ ДЛЯ МЕГАМИРА Казалось бы, куда уж дальше, но есть совершенно безграничная область для фантазии роботостроителей — мегамир. В наше время, когда человечество планомерно осваивает ближайшую соседку Земли — Луну, фантасты устремились к звёздам. В одной нашей Галактике больше сотни миллиардов солнц, не исключено, что у многих есть планеты. Из всех космических грёз самая распространённая и самая заманчивая — мечта о встрече с братьями по разуму, с иными цивилизациями, желательно, с более развитыми, способными передать нам секреты ещё не сделанных открытий. Однако даже в Солнечной системе нет планеты, где человек остался бы в живых, сняв скафандр. Исследования мегамира связаны со сверхдальними космическими полётами. Для таких полётов потребуется время, превышающее длительность человеческой жизни. Спрашивается: есть у человека способ исследовать мегамир? Да, имеется. Это создание кибернетической системы — робота, управляемого искусственным интеллектом и рассчитанного на длительное функционирование в мегамире. Такой робот может достичь самых дальних районов Вселенной. Неизвестность сред, в которых придётся функционировать системе, непредвиденность и сложность конкретных задач, которые придётся ей решать, исключают возможность построения системы управления робота с заданным алгоритмом, сколь бы широкий круг задач в нём не был предусмотрен. Управлять системой можно будет, только моделируя творческое мышление человека. Система должна быть саморазвивающейся, причём это касается и саморазвития искусственного интеллекта (рис. 9). Искусственный интеллект должен уметь решать такие частные, но важные проблемы, как формирование языка, распознавание образов, построение гипотез, выбор критериев успеха, самообучение. Подобно человеку, автономная система робота — астронавта с искусственным интеллектом не сможет моделировать реальный мир, если не пройдёт обучения такому моделированию в известных человечеству средах и если переход от известных сред к неизвестным не будет для этой системы постепенным. Проблема создания автономно функционирующего робота — астронавта, управляемого искусственным интеллектом и предназначенного для сбора полезной человечеству информации в мегамире, сегодня стоит на рубеже научных исследований дальнего поиска. 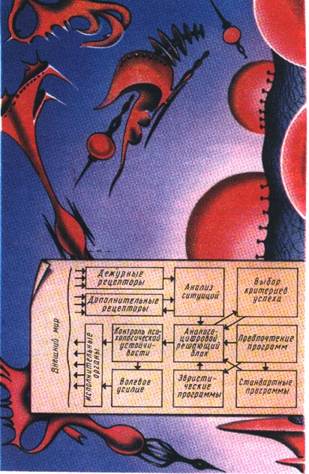 Рис. 9. Структурная схема системы искусственного интел гекта робота для мегамира ЧТО ЖЕ НАМ ДЕЛАТЬ? Роботизация. Роботы и робото-технические системы. Это все очень серьёзно. Именно поэтому мы начали книгу со всестороннего обзора основных проблем роботизации. В последующих разделах мы перейдём к вопросам моделирования различных систем роботов, будем думать, как изготовить ту или иную систему или даже целого робота. Каждый может внести свой вклад в эту важнейшую государственную проблему. Вы сами видите, как велико здесь поле деятельности и как интересна любая задача. На занятиях кружка радиоэлектроники автор этой книги задал ребятам вопрос: если бы мы с вами занялись конструированием человекоподобного робота, то какими электронными системами вы бы его оснастили? И вот пятеро мальчиков ответили, что кроме общепринятых систем зрения, слуха, осязания они бы оснастили робота следующими устройствами: 1. Аварийной системой, останавливающей все механизмы робота при появлении тревожного возгласа «Аи»! или «Ой»! 2. Системой «веди меня» — если робота взять за руку и потянуть, он пойдёт за вами. 3. Системой различения команд, подаваемых голосом: «Иди», «Стой», «Здравствуй», реагирующей на звучание букв «и», «о», «а», отличающихся своими частотами. 4. Системой поворачивания головы робота на появившийся звуковой сигнал. 5. Системой «кивок» — робот доброжелательно кивает, когда с ним кончают говорить. 6. Системой движения губ робота и изменения свечения ламп во рту робота в такт с его речью 7. Инфракрасными локаторами, предохраняющими робота от столкновения с препятствием. 8. Системой, обеспечивающей физкультурную зарядку робота — цикл различных движений по определённой программе. 9. Системой «настроение робота», изменяющей активность его движений, издающей «смех», когда он доволен, и «унылое ворчание» — когда недоволен. 1, 2, 3, 4, 5, 6, 7 |
|||||||