 |
|
Популярные авторы:: Чехов Антон Павлович :: Азимов Айзек :: Борхес Хорхе Луис :: Андреев Леонид Николаевич :: Толстой Лев Николаевич :: Лондон Джек :: Горький Максим :: БСЭ :: Грин Александр :: Раззаков Федор Популярные книги:: Справочник по реестру Windows XP :: Верблюжий глаз :: Сон Педро Энрикеса Уреньи :: Посланники хаоса-1: Проверка на прочность :: Ах, эти козы! :: На страже :: Книга о верных и неверных женах :: Ад есть ад :: Лунный нетопырь :: Записная книжка Дьявола |
Занимательная анатомия роботовModernLib.Net / Технические науки / Мацкевич Вадим Викторович / Занимательная анатомия роботов - Чтение (стр. 6)
В чём принципиальные преимущества использования в массовых объектах управления микропроцессоров и микроЭВМ? Главное — малые габариты и потребляемая мощность, низкая стоимость микропроцессорных вычислительных систем, особенно так называемых однокристальных, у которых на одной кремниевой пластине объединены микропроцессор и запоминающие устройства. Уже одно это позволяет применять вычислительную технику в тех областях, где ранее вычислительные и управляющие машины были недоступны из-за «барьера стоимости» и сложности организации промышленного выпуска необходимого их количества. Благодаря малым размерам микропроцессорную систему можно легко разместить на станке, в кабине трактора, в корпусе робота — манипулятора, в магнитофоне, в телефонном аппарате. 10. НА ПУТИ К СОЗДАНИЮ ИСКУССТВЕННОГО ИНТЕЛЛЕКТА МЫСЛЯЩИЙ РОБОТ Для того чтобы поведение робота было целенаправленным, его «мозг» должен принять на себя функции системы центрального управления: командовать руками, ногами и другими системами, а также контактировать с окружающей средой, следить за её изменениями. Робот объединяет в себе систему восприятия информации из среды, систему искусственного интеллекта и систему выполнения своих механических действий. Поэтому таких мыслящих роботов и назвали интеллектуальными. Интеллектуальный робот — это цельная искусственная система, способная соответственно вести себя при решении определённой задачи. Робот воспринимает информацию о внешнем мире, анализирует обстановку, принимает решение и сам его реализует. Чтобы осуществить эту сложную деятельность, робот, как и человек, должен планировать своё поведение. Это значит, что все поведение предварительно он должен разделить на отдельные поступки. Совершая поступки, робот непрерывно их контролирует и сравнивает с заданием. Если же поступок робота не соответствует заданию, он анализирует причины случившегося, принимает решение локального характера. На всём маршруте движения робот должен подчинять своё поведение достижению конечной цели. ВНУТРЕННИЙ МИР РОБОТА Чтобы выполнить план своих действий, роботу нужно прежде всего иметь представление о внешнем мире. Если бы окружающая среда была статичной, было бы легко принимать решения и выполнять план своих действий. Однако она беспрерывно изменяется. В ней нельзя все запрограммировать, как и нельзя все предвидеть. Поэтому робот должен всегда получать информацию о состоянии внешнего мира. А для этого нужно построить внутреннюю модель реального мира. Эта модель представляет собой совокупность сведений о реальном мире, в котором функционирует робот. Одни интеллектуальные роботы обладают большими способностями, другие — меньшими, но все они воспринимают внешний мир, строя свой, внутренний, и самостоятельно управляют своими действиями. Всех их объединяет одно преимущество перед остальными роботами — это способность самостоятельно «осмысливать» окружающую обстановку и соответственно с заданием действовать. ПРИНЯТИЕ РЕШЕНИЙ — ВАЖНЕЙШИЙ ЭТАП ПРОЦЕССА РАЗУМНЫХ ДЕЙСТВИИ Итак, начало положено! Электронные вычислительные машины могут воспроизводить некоторые функции нервной системы человека. Один из создателей теории автоматического управления — Уильям Эшби по этому поводу сказал: «Мы знаем, что мозг и вычислительные машины представляют собой просто различные варианты в принципе одинаковых машин». Просто, да не совсем! Ещё очень многое из того, на что способен мозг человека, не под силу воспроизвести самым совершенным ЭВМ. Примером может служить распознавание различных предметов, шрифтов, речи, т. е. то, что сейчас именуют распознаванием образов. В разумных действиях этот процесс является только ступенью общего процесса принятия разумного решения, который является важнейшим завершающим этапом деятельности мозга. Для того чтобы создать машину, способную принимать решения, недостаточно довести её до фазы распознавания образов и анализа ситуации, а придётся ещё наделить её способностью окончательного выбора и принятия решения. В последнее время на смену первым малоэффективным программам опознания пришли новые, более эффективные; наступил этап макетирования новых опознающих устройств — перцептронов (от слова «перцепция» — восприятие). В результате разработки технических моделей биологических анализаторов было создано несколько экспериментальных образцов перцептронов, предназначенных для автоматического восприятия и опознания зрительных образов. В принципе возможно создание перцептронов, моделирующих органы слуха, обоняния, осязания и других чувств. Зрительный перцептрон более всего напоминает сетчатку глаза. В перцептроне имеется несколько слоёв «клеток», перерабатывающих сигналы; как и в сетчатке, эти слои соединены между собой сложными множественными связями; первичные сигналы перерабатываются таким образом, что на выходе перцептрона требуется значительно меньше элементов, чем на его входе. И на входе сетчатки глаза человека имеется 137 миллионов светочувствительных клеток, а на выходе — всего лишь миллион нервных клеток. Идеи создания перцептронов — элементов искусственного интеллекта — в наши дни привлекают внимание не только учёных. В определённой степени эта идея доступна молодым энтузиастам технического творчества и роботостроения. Роботы должны стать разумными! Для них нужно создать системы распознавания образов и принятия решений. Мы познакомимся с некоторыми конструкциями перцептронов, которые могут изготовить и затем усовершенствовать энтузиасты технического творчества и роботостроения. Создать классическую структуру перцептрона в любительских конструкциях нелегко. Особенно сложно выполнить его систему обучения. ПЕРЦЕПТРОН Почтовый перцептрон. «Почтовое учреждение в Эдинбурге, господину Виллару Лау, ювелиру, в собственные руки, недалеко от Парламента, вниз по ярмарочной лестнице, против Акциза» — вот как выглядел адрес во второй половине XVIII столетия. Чтобы доставить письмо по назначению, почтальону приходилось выполнять функции адресного стола. Впрочем, писем тогда писали не так уж много. В наше время на каждом почтовом конверте указан точный адрес: область, город, улица, номер дома, квартиры, фамилия адресата. Нетрудно представить, какого большого числа квалифицированных сортировщиков требует столь огромный объём корреспонденции (пусть и точно адресованной). Процесс сортировки писем значительно упрощается с введением цифровой шестизначной индексации. Согласитесь, что прочитать шестизначное число, написанное стандартными цифрами, намного легче, чем сам адрес. В соответствии с цифровой системой индексации вся территория Советского Союза условно разбита на отдельные участки. Каждый такой условный участок обозначен первыми тремя цифрами шестизначного индекса. Четвёртая цифра индекса обозначает одну из десяти зон, входящих в участок; пятая — один из десяти секторов зоны; шестая — одно из десяти адресных предприятий связи, относящихся к данному сектору. Для написания цифр применяют специальную сетку, состоящую из девяти элементов (рис. 74). 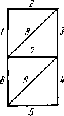 Рис. 74. Сетка из девяти элементов Сетку заполняют цифрами, после чего адрес, закодированный шестизначным числом, может прочесть автомат — сортировщик писем. Как это происходит? По сути, автомату вовсе не обязательно, чтобы начертания цифр имели привычный для нас вид. Главное, чтобы две любые цифры различались хотя бы одним элементом. Оказывается, что минимальное число элементов, с помощью которых можно составить 10 различных комбинаций — кодов цифр, — равно 4. Если мы выберем элементы 2, 3, 7 и 4 по рис. 74, то коды цифр будут иметь вид, показанный на рис. 75. Значит, опознавать цифры можно с помощью всего четырёх фотоэлементов. Электронное опознающее устройство и является перцептроном. Принципиальная схема автомата, читающего цифры, показана на рис. 76. Фоторезисторы BR1 — BR4 установлены в считывающей ячейке (рис. 77). В элементе 2 изображения цифры (см. нумерацию рис. 75) расположен фоторезистор BR1, в элементе 3 — BR2, 4 — BR3, 7 — BR4. Последовательно с каждым фоторезистором включена обмотка соответствующего электромагнитного реле К1 — К4. При освещении фоторезистора его сопротивление уменьшается, ток, протекающий через него, увеличивается, в результате чего реле срабатывает. Контакты реле К1 — К4 включены по схеме дешифратора. Наложим, к примеру, на ячейку цифру 3 индекса, вырезанную из жести или плотного картона. Тогда фоторезисторы BR1 и BR4 будут закрыты, a BR2 и BR3 — освещены внешним светом. Реле К2 и КЗ срабатывают, и включается лампа HL6, подсвечивающая цифру 3. Аналогично автомат опознает и другие девять цифр.  Рис. 75. Вид цифр 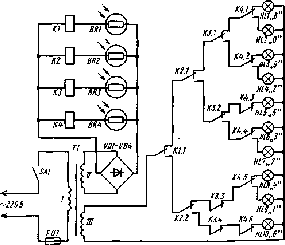 Рис. 76. Принципиальная схема читающего автомата 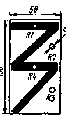 Рис. 77. Считывающая ячейка 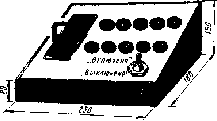 Рис. 78. Внешний вид перцептрона В устройстве применены следующие реле: К1 и К2 — РЭС9 (паспорт РС4, 524.201), КЗ — РЭС22 (паспорт РФ4.500.131), К4 — РС13 (паспорт РС4.523.07). Фоторезисторы — ФСК-1. Трансформатор Т1 набирают из пластин Ш20, пакет толщиной 40 мм. Обмотка I содержит 14000 витков провода ПЭЛ 0,31; II — 450 витков провода ПЭЛ 0,15; III — 45 витков провода ПЭЛ 0,8. Диоды Д226Б можно заменить на Д7Е, Д7Ж, Д226В. Внешний вид прибора представлен на рис. 78. На лицевой панели корпуса расположена ячейка с фоторезисторами и индикаторное устройство — цифры 1 — 9, О, подсвечиваемые лампами HL1 — HL10. Описанная модель опознает цифры одного разряда почтового индекса. Увеличив число подобных устройств до шести, мы сможем добиться опознавания всех цифр индекса. Перцептрон на микросхемах. В 1985 году в журнале «Радио» была опубликована схема микроэлектронного перцептрона, который разработан под руководством Л. Д. Пономарёва и распознает пять цифр (рис. 79). Глаз перцептрона состоит из четырёх блоков А1 — А4 с фотодиодами BD2 — BD4. На стыке элементов 1 и 2 сетки (см. рис. 74) размещён фотодиод ячейки А1, под ним на стыке элементов 1, 7 и 6 в левом нижнем углу находятся ячейки A3, в правом нижнем — ячейки А4. Над фотодиодами в корпус автомата вмонтированы осветители (на схеме не показаны). Пока глазу ничего не показывают, все его фотодиоды освещены и транзистор в каждой ячейке открыт. На коллекторе транзистора — небольшое напряжение, соответствующее уровню логического 0. Сигналы с ячеек поступают на дешифратор, состоящий из логических элементов микросхем DD1 — DD4. Выходными элементами дешифратора служат логические элементы с открытым коллектором, поэтому если на выходе этих элементов присутствует уровень логической 1, лампы HL1 — HL4 на табло перцептрона выключены. 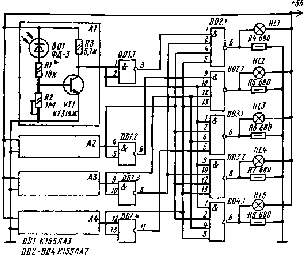 Рис. 79. Перцептрон на микросхемах Как только к глазу перцептрона будет поднесена, скажем, цифра 1, нарисованная черным лаком на пластине из органического стекла, она закроет фотодиоды второй и четвёртой ячеек. Закроются соответствующие транзисторы, и на входах элементов DD1.2, DD1.4 будет напряжение, соответствующее уровню логической 1, а на их выходах — логического 0. Нетрудно проследить, что при этом у элемента DD2.1 на всех входах будет сигнал 1, а на выходе — 0. Включится лампа HL1, высветив на табло цифру 1. Когда глазу перцептрона покажут цифру 2, загорится лампа HL2, при цифре 3 будет светиться лампа HL3, и т.д. В перцептроне можно применить другие фотодиоды, разброс их параметров компенсируют под — строечным резистором R2 и подборкой резистора R1. Лампы HL1 — НЬ5 — на напряжение 6,3 В и ток не более 60 мА. САМОВОСПРОИЗВОДСТВО РОБОТОВ От искусственного интеллекта и самообучения ЭВМ и роботов остаётся совсем немного до проблемы самовоспроизводства роботов. Рассмотрим самую удивительную из всех кибернетических машин — машину, способную к самовоспроизводству или, ещё лучше, способную производить более совершенные машины, чем она сама (рис. 80). 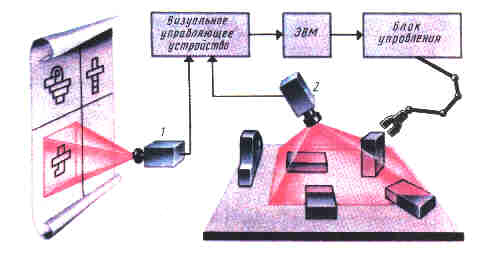 Рис. 80. Схема робота, собирающего по чертежу По идее Дж. фон Неймана машина — родитель представляется помещённой в содержащее компоненты ограниченное пространство, из которых состоят аналогичные машины. По инструкции, записанной на ленте, машина — родитель должна отбирать необходимые элементарные компоненты и строить из них потомка. Чтобы понять существо этого предложения, необходимо чётко уяснить принцип блочной конструкции. Машины, отвечающие современным требованиям, имеют сравнительно простую конструкцию, ибо для их построения применяют заранее изготовленные блоки. Не меньшее значение имеет замечательный вывод известного физика, лауреата Нобелевской премии Джорджа П. Томсона, высказанный им в его проникновенной книге «Предвидимое будущее»: «Миру, в котором мы живём, присуща одна особенность столь общего и столь универсального характера, что она не привлекла к себе, по — видимому, должного внимания. Я назову её, за отсутствием лучшего определения, „принципом массового производства“. Это — тенденция природы к почти бесконечному повторению всех порождаемых ею существ. Нагляднее всего эта тенденция проявляется, видимо, в мире мельчайших объектов. Во вселенной существует меньше ста разновидностей атомов, а сами эти сто разновидностей состоят из очень малого числа (из двух или трёх) обычных, элементарных частиц — электронов, протонов и нейтронов. На этом уровне все индивидуумы, образующие множество объектов, идентичны. Примеры, подтверждающие это положение, могут быть найдены в мире как живой, так и неживой природы: дождевые капли, песчинки, частицы дыма, бактерий, клетки любого куска с виду однородной органической ткани. Всякое дерево покрыто летом большим, хотя, быть может, и не вполне одинаковым количеством листьев. Каждый лист состоит из множества сравнительно немногочисленных разновидностей клеток… С моей точки зрения, эта множественность представляет собой самую замечательную особенность вселенной, какой она предстаёт перед нами. Внимательный наблюдатель обнаруживает это даже визуально, а прогресс в области разработки точных инструментов и в развитии научных познаний выявляет эту особенность уже с полной и поразительной очевидностью. Это, безусловно, одно из основных явлений мира, которых не изменят никакие новые открытия. Атомизм в самом широком смысле этого понятия — массовое производство, осуществляемое природой, — представляет собой глубочайшую из научных истин» [Томсон Дж. П. Предвидимое будущее. М.: ИЛ, 1958. Стр. 35 — 37]. И в самом деле, элементарные логические ячейки, составляющие основу современных ЭВМ, знают только два сочетания: 1 и 0. А ведь ЭВМ способны управлять не только роботами, но и сложнейшим производством, а иной раз выигрывать в шахматы у гроссмейстеров, и все это на основе различных логических сочетаний все тех же элементарных ячеек. Вот и ключ к решению задачи самовоспроизводства: машине — строителю нужно только умело собирать блоки элементарных логических ячеек и создавать потомство с большей памятью и другими перспективными характеристиками. 11. КОНСТРУИРОВАНИЕ РОБОТОВ РОБОТЫ — ИГРУШКИ На рис. 81 вы видите модель кибернетического краба, созданную юными техниками в пионерском лагере им. Вити Коробкова (Крымская обл.). Краб двигается на свет электрического фонаря или на солнечный свет, перемещаясь с помощью двух электродвигателей с редукторами, которые вращают колесо (такие узлы есть в комплекте многих детских электромеханических конструкторов). Поверх ходовой части на металлической плите собраны два узла зрения из радиокубов. Нос краба — отсек с батареями 3336 (для питания двигателей) и «Крона» (для питания устройства зрения) — отделяет один глаз краба от другого. Поэтому боковой свет попадает только в один глаз, и его реле включает электродвигатель, разворачивающий краба в сторону источника света. Как только свет попадает и во второй глаз, включается второй электродвигатель и краб движется прямо на источник света. Чтобы в глаза краба попадало больше света, его металлическая платформа установлена под углом 45° к горизонту. Третье колесо, поддерживающее платформу, свободно поворачивается при её поворотах. 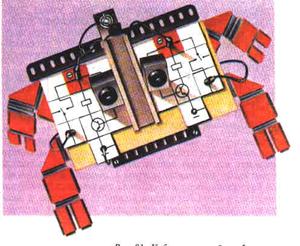 Рис. 81 Кибернетический краб Эту конструкцию можно усовершенствовать. Например, установить на крабе лампу, на свет которой реагировала бы система зрения другого краба. Эту игру можно назвать «электронной охотой». Крабы, снабжённые лампами, будут охотиться друг за другом, пока один не настигнет другого. Такие же устройства зрения можно установить в фанерную модель собаки, и она, подобно крабу, будет двигаться на свет, лая и помахивая хвостом. Известно много других примеров простейших кибернетических автоматов, моделирующих поведение живых существ. Наши модели, взаимодействуя с внешней средой, воспроизводят некоторые элементы поведения живых организмов. Внешняя среда воздействует на органы чувств живого организма. У автоматических же моделей роль чувств выполняют чувствительные элементы, способные реагировать на различные воздействия внешней среды. В качестве таких элементов служат фотоэлементы, микрофоны, чувствительные электромеханические реле, реагирующие на механические воздействия, и другие электронные приборы. КИБЕРНЕТИЧЕСКАЯ ИГРУШКА С ПРОГРАММНЫМ УПРАВЛЕНИЕМ На рис. 82 изображён забавный щенок, который ходит, весело виляя хвостом, лает, поворачивая голову направо и налево, останавливается, озираясь по сторонам, и затем снова с лаем продолжает движение. Его сконструировал юный техник москвич Мясум Аляутдинов. Электронный блок модели представляет собой программное устройство из трёх реле времени. Одно реле подключает питание к двум другим на определённое время (около минуты), после чего модель останавливается. Два программных реле периодически останавливают модель, включая устройство лая, или переводят его в режим движения. Чтобы получить длительные задержки с эксиодными конденсаторами небольшой ёмкости, оба реле времени собраны на операционных усилителях. 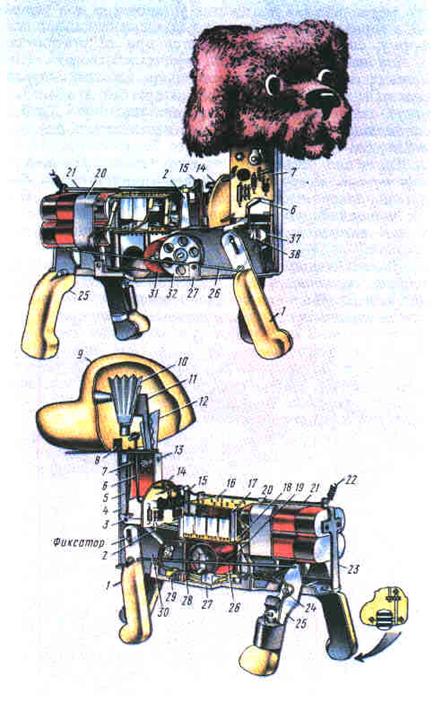 Рис. 82 Кибернетическая собака При вращении шестерни 44 по часовой стрелке «плавающая» шестерня 39 перемещается вверх и зацепляется шестернёй 35 через промежуточную шестерню 34. Шестерня 35 вращает вал с кривошипом 36, и движение через тягу 6 передаётся голове 9. При этом раскрывается пасть и одновременно при растяжении сжатой пружины 33 устройство имитирует лай. Звучащим устройством служит механическая пищалка. Итак, собака лает, виляет хвостом, поворачивает в разные стороны голову. Сложнее механическая часть игрушки. Она состоит из устройства, преобразующего с помощью кривошипно-шатунного механизма и промежуточных рычагов и тяг вращательное движение электродвигателя в возвратно-поступательные движения головы, лап и хвоста. Необходимый вращательный момент на валах, на которых укреплены шестерни механизма, обеспечивает реверсивный многоступенчатый редуктор. Для изменения направления вращения выходного вала достаточно изменить полярность источника питания электродвигателя. Наглядное представление о работе механической части игрушки даёт её кинематическая схема (см. рис. 83). При вращении шестерни 44 против часовой стрелки «плавающая» шестерня 39 перемещается вниз, зацепляется с шестернёй 38, которая, в свою очередь, передаёт движение на коленчатый вал 37. Этот вал, шар — нирно соединённый с передними лапами 1, заставляет их касаться пола, имитируя ходьбу. Задние лапы 25 передвигаются благодаря шарнирному соединению с передними через тяги 26. Во время ходьбы движется хвост 21 и поворачивается голова 9. 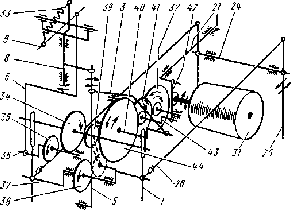 Рис. 83 Кинематическая схема Тягу хвоста 21 приводит в движение шестерня 41, кривошип 43 и тяга 42, а тягу 5 головы — рычаг 3, прикреплённый к валу шестерни 44. Несущим элементом конструкции является шасси 27 (см. рис. 82), на котором установлены редуктор 30, электродвигатель 31 и все остальные детали. Они закрыты кожухом. Шасси и большая часть деталей механизма изготовлены из листовой стали толщиной 0,8 мм. К шасси вдоль ребра жёсткости в месте сгиба припаяна накладка. Тяги 6 и 26 изготовлены из стальной проволоки диаметром 1,5 и 2,5 мм соответственно. На концах всех тяг просверлены отверстия, в которые вставлены шплинты из проволоки. Большинство деталей конструкции фиксировано винтами М2. Редуктор — самодельный, изготовлен из шестерён от старых игрушек. Ведомая шестерня 32 редуктора сцеплена с электродвигателем шестернёй диаметром 7 мм, насаженной на его вал. Боковые стенки редуктора изготовлены из листовой стали толщиной 1 мм. Их крепят тремя винтами М2,5. На винты между пластинами надевают металлические втулки с наружным диаметром 4,5 мм и длиной 15 мм. Кривошипы, надеваемые на валы, сделаны из латуни (или из дюралюминия). Батарею 3336, питающую электродвигатель, крепят на шасси двумя скобами 20 (см. рис. 82), а монтажные платы 16, 18 дешифратора — на пластмассовых стойках 17 и 19. В игрушке используется электродвигатель ДИ1 — 3 14МО 390 001 ТУ. По сравнению с другими аналогичными двигателями он обладает повышенной мощностью, высоким КПД, низким уровнем акустических шумов и радиопомех. Пищалка 10 сделана из плотного картона и оклеена калькой. Внутри закреплена распорная пружина из стальной проволоки диаметром 0,5 мм. Звук издаёт металлическая пластина толщиной около 0,08 мм, вибрирующая под действием струи воздуха, входящего в полость пищалки. Крепят её к стойке 11, припаянной к нижней части головы. Голова 9 и кожух — из папье-маше (обрезки хлопчатобумажной ткани, пропитанные казеиновым клеем). Электромеханическая часть игрушки сложна в изготовлении. Но трудности её изготовления компенсируются радостью, которую вы получите от общения с этой весёлой игрушкой. ЧЕЛОВЕКОПОДОБНЫЕ РОБОТЫ Модель простейшего человекоподобного робота с программным управлением показана на рис. 84. Высота робота около 70 см, и, хотя вид у него внушительный, он сделан из тонкого картона, покрыт металлизированной бумагой и окрашен серебристо — голубой краской. В ступнях робота размещены батареи и электродвигатели, перемещающие робота на обрезиненных колёсах. Как сконструировать ноги робота, чтобы он шагал, поясняет рис. 85. При конструировании больших роботов трудно сделать модель устойчивой. Поясним отдельные конструктивные решения в таком роботе на примере модели, сделанной юными техниками из г. Щёлково. На рис. 86 дан чертёж этого робота в профиль и указаны основные размеры конструкции. Ступни робота сделаны очень большими, чтобы увеличить устойчивость модели. Ноги робота с верхней горизонтальной платформой свободно отделяются от туловища. В массивных ступнях модели находятся батареи аккумуляторов и механизмы, приводящие в движение задние колеса каждой ступни. Всего в каждой ступне смонтировано по три металлических колеса с жёсткими резиновыми обоймами. В средней части ноги проходят металлические тяги, благодаря которым достигается устойчивость модели во время движения. Свободное пространство в ногах заполнено различными блоками электронного оборудования модели, доступ к которым возможен через люки под коленными дисками робота. Туловище робота устанавливают на горизонтальную платформу и крепят замками. На платформе смонтированы реле и электромеханические автоматы, управляющие электродвигателями движения ног. При ходьбе ноги робота шагают, не отрываясь от пола (катятся). Такая конструкция ног позволяет роботу не только устойчиво ходить, но даже «плясать» под музыку.  Рис. 84. Модель простейшего робота  Рис. 85. Ноги робота 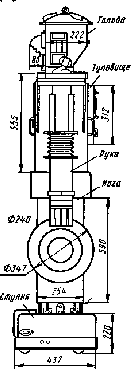 Рис. 86. Чертёж робота 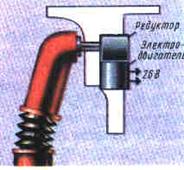 Рис. 87. Механизм подъёма руки Как работает механизм подъёма рук робота, поясняет рис. 87. На рис. 88 показана конструкция локтевого сустава модели. Когда робот берет в руку предметы, он прижимает их большим пальцем руки, поворачивающимся с помощью электромагнита (рис. 89) 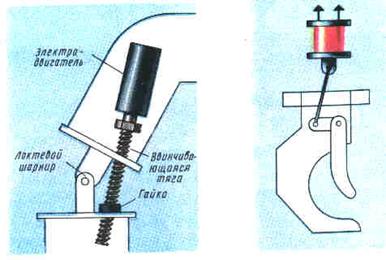 Рис. 88. Локтевой сустав робота. Рис. 89. Рука робота Голову робота поворачивают также электродвигатель с редуктором. Всюду в модели установлены конечные выключатели, определяющие пределы перемещения ног, рук и головы. КОНСТРУИРОВАНИЕ РОБОТОВ — МАНИПУЛЯТОРОВ Многие наши школьники уже самостоятельно конструируют промышленных роботов — разумеется, в кружках под руководством специалистов. Так, школьники из Подмосковья (г. Электросталь) не так давно изготовили механическую руку (рис. 90). Рука робота укреплена на самодвижущейся тележке. Управляют рукой и тележкой с пульта дистанционно. Устройство предназначено для работы в токсичной среде.  Рис. 90. Механическая рука 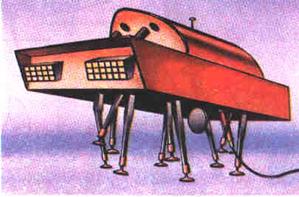 Рис. 91. Космический шагоход «Марс-1» Ребятами созданы многочисленные модели стопоходящих роботов, оснащённых манипуляторами. На рис. 91 показана действующая модель космического шагохода «Марс-1», разработанного учащимися Одессы. Если вы займётесь конструированием моделей манипуляторов, то вам помогут некоторые типовые конструкторские решения индустриальной робототехники, с которыми мы сейчас познакомимся. Системы привода современных манипуляторов. Современные системы привода промышленных манипуляторов примерно в 20% случаев пневматические, в 50% — гидравлические и в 30% — электрические. Гидравлический привод целесообразен в манипуляторах, оперирующих большими массами, пневматический, как более скоростной, — в схватывающих устройствах. Электрический привод удобнее использовать в обучающихся роботах, выполняющих различные рабочие операции (рис. 92). Он, как правило, состоит из тиристорного или транзисторного устройства питания 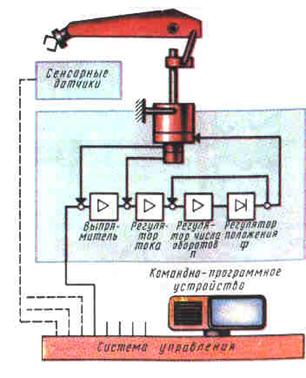 Рис. 92 Электрическии привод робота 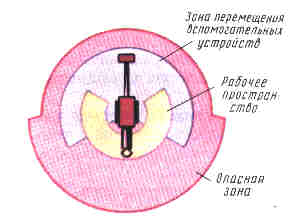 Рис. 93 Зоны действия манипулятора 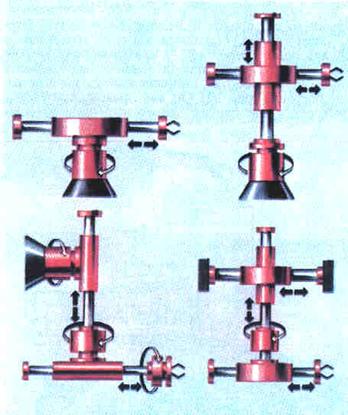 Рис. 94 Варианты установки манипулятора ‹-› Устройство поступательного движения ‹поворотное устройство 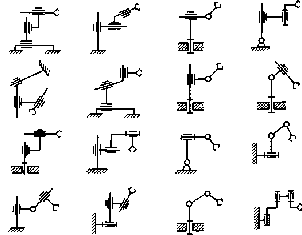 Рис. 95 Примеры кинематических схем манипуляторов электропривода и системы контроля за траекторией движения манипулятора. В систему контроля входят устройства регулирования тока электропривода, регуляторы частоты вращения и положения манипулятора. В отдельном шкафу размещено командно — программное устройство и телевизионный экран системы контроля и управления. Рабочие зоны манипулятора и зоны опасности. Зоны действия манипулятора (рис. 93) — это рабочее пространство, зона перемещения вспомогательных устройств манипулятора (его направляющих, противовесов и т.д.) и зона опасности. При налаживании манипулятора определяют его запрограммированное рабочее пространство, размеры которого меняются от задачи к задаче. Структура манипулятора в зависимости от его размещения на рабочем месте. Из рис. 94 видны возможные варианты установки манипулятора и характер движения его основных элементов в различных условиях. Стрелки на рисунке показывают виды движения устройств манипулятора. На рис. 95 приведены примеры кинематических схем различных вариантов манипуляторов. РАБОЧИЕ ОРГАНЫ ПРОМЫШЛЕННЫХ РОБОТОВ Рабочие органы промышленных роботов предназначены для захвата, удержания изделия и перемещения его при выполнении технологических операций. В соответствии с назначением все рабочие органы можно разделить на две группы: рабочие органы типа схвата и технологические рабочие органы. К первой группе относят механические с жёсткими или пружинными губками, вакуумные, электромагнитные и струйные схваты, а ко второй — клещи для контактной точечной сварки, горелку для электродуговой сварки, распылитель для окраски, специальные инструменты. Конструируя механические схваты промышленных роботов, приходится учитывать конкретный тип детали или группы деталей, их форму, материалы и условия технологического процесса. Важные критерии при этом — необходимая точность удержания детали и допустимо усилие на губках. Перечисленные соображения привели к тому, что в настоящее время существует много различных схватов, отличающихся кинематической схемой, формой губок и конструкцией. Как правило, механический схват приводит в движение пневматический цилиндр, расположенный в центре кисти робота. Управляет таким цилиндром блок управления роботом, а воздух поступает от общей магистрали. Конструкции механических схватов могут иметь разные размеры, расположение и форму губок, тип привода и т.д. Для удержания легко деформируемых изделий используют эластичные губки, в том числе и надувные. Для удержания таких хрупких предметов, как, например, кинескоп телевизора, применяют вакуумные схваты. 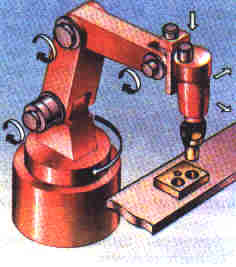 Рис. 96. Общий вид типового индустриального сборочного робота На рис. 96 изображён общий вид типового индустриального сборочного робота. Грубые движения робота выполняют мощные системы привода, подводящие его схват с устройствами точной ориентации к рабочему месту. После этого в действие вступают устройства точной ориентации схвата, находящиеся на его головке. ЗАКЛЮЧЕНИЕ. ЗАВОДЫ — РОБОТЫ БУДУЩЕГО Возможно на предприятиях будущего у проходной повесят табличку: «Людям вход строго воспрещён!» Сегодня мы нередко сталкиваемся с ситуацией, когда человек в силу своих ограниченных физических и психических качеств становится тормозом на пути развития производства, вынуждает оплачивать своё присутствие у печи или в цехе расходами на создание приемлемых условий труда. Роботизация снимает эти ограничения и тем самым открывает пути к качественным преобразованиям в сфере производства. 1, 2, 3, 4, 5, 6, 7 |
|||||||