 |
|
Популярные авторы:: Кларк Артур Чарльз :: Горький Максим :: БСЭ :: Чехов Антон Павлович :: Joyce James :: Борхес Хорхе Луис :: Азимов Айзек :: Фармер Филип Хосе :: Лондон Джек :: Толстой Лев Николаевич Популярные книги:: The Boarding House :: Бурый волк :: Обман :: Единственный способ :: Справочник по реестру Windows XP :: Подземная Москва :: Чужое :: Движущая сила :: Легенды о звездных капитанах :: Мятежная княжна |
Пилотируемые полеты на ЛунуModernLib.Net / Технические науки / Шунейко Иван Иванович / Пилотируемые полеты на Луну - Чтение (стр. 9)
Схема, иллюстрирующая расчет требуемого сигнала коррекции ошибки управления приведена на рис. 32.3. Векторы положения, скорости и гравитационного ускорения подсчитываются, как указывалось раньше. Требуемая для выполнения конкретной задачи полета импульсная скорость определяется по вектору положения и используется для расчета Vg. Точно произведенный расчет на выходе системы выдает вектор командной угловой скорости, величина которогй пропорциональна малой угловой разности между действительным и командным векторами ускорения от тяги и направление его указывает требуемое направление поворота аппарата, чтобы свести к нулю ошибку. Перед концом маневра, когда Vg мало, аппарат сохраняет постоянную ориентацию, а выключение ЖРД осуществляется по измеряемой величине вектора Vg.
Главные составные части и приборы системы управления и навигации корабля Apollo: блок инерциальных измерений; астронавигационный блок оптических измерений; бортовая ЭЦВМ; пульт управления с экраном-индикатором; шаровой индикатор полета. Блок инерциальных измерений выдает фиксированную в инерциальном пространстве систему координат и в этой системе координат осуществляет измерение компонентов ускорения аппарата. Блок оптических измерений с помощью секстанта и сканирующего телескопа измеряет направления на звезды и позволяет точно ориентировать в инерциальном пространстве систему координат стабилизированной платформы. Бортовая ЭЦВМ производит расчеты по навигации и управлению и выдает команды на управление полетом корабля. Пульт управления дает возможность экипажу управлять бортовой ЭЦВМ и осуществляет обмен информацией между экипажем и бортовой ЭЦВМ. Шаровой индикатор полета визуально отображает пространственную ориентацию и курс корабля и позволяет осуществить визуальный контроль коррекции ошибок ориентация. Перед каждым маневром управления траекторией полета производится выставка инерциально стабилизированной платформы. Выставка платформы осуществляется в 2 этапа – грубая и точная. Грубая выставка производится с использованием в бортовой ЭЦВМ известной ориентации корабля. Штурман с помощью сканирующего телескопа с широким углом обзора последовательно наблюдает 2 звезды. Найдя звезду, ручкой управления оптической системы он совмещает звезду с перекрестьем визирных линий сканирующего телескопа, нажав кнопку посылает сигнал бортовой ЭЦВМ прочитать блоку согласования данных углы звезды. Так же измеряются углы второй звезды, расположенной на достаточно большом угловом расстоянии от первий. Таким образом определяется ориентация корабля относительно трех измерений. Далее бортовая ЭЦВМ определяет требуемые углы кардана блока инерциальных измерений и маневр, который должен быть произведен. Требуемые углы, посланные в блок инерциальных измерений через блок преобразования данных, подгоняются сервомоторами кардана блока инерциальных измерений в ответ на сигналы ошибок, вырабатываемые на угловых передачах каждой оси кардана. Чтобы произвести точную выставку блока инерциальных измерений, штурман снова измеряет угловые координаты двух звезд, но в этом случае он пользуется секстантом с 28-кратным усилением и узким углом обзора, обеспечивающим необходимую точность измерений. Когда подается штурманом сигнал, бортовая ЭЦВМ одновременно считывает показания секстанта и углы блока инерциальных измерений, передаваемые блоком преобразования данных; по этим данным определяется направление звезды в координатах блока инерциальных измерений и может быть определена точная ориентация. Зная желаемую ориентацию, бортовая ЭЦВМ определяет ошибки существующей ориентации блока инерциальных измерений и высчитывает необходимое число гиромагнитных импульсов, посылаемых сервомотором кардана, чтобы скомпенсировать ошибки выставки инерциальной платформы. На пассивных участках траектории полета при отсутствии больших действующих на корабль сил задачей ЦАП является управление ориентацией с помощью РСУ. Сохранение заданной ориентации – стабилизация корабля – осуществляется ЦАП с помощью управления соленоидными топливными клапанами ЖРД РСУ непосредственно по информации об ошибках ориентации и угловой скорости ориентации. Сигналы ошибок ориентации блока преобразования данных преобразуются из цифровой в аналоговую форму для привода стрелочных указателей ошибок ориентации на шаровом индикаторе полета. Главным в режиме стабилизации корабля является определение ЦАП угловой скорости ориентации; от точности расчета угловой скорости зависит экономия топлива и способность системы сохранить ошибки ориентации в пределах зоны нечувствительности. ЦАП, управляя маневром ориентации корабля Apollo, использует ту же самую логику, которая применяется на режиме стабилизации, но с дополнением команд по угловой скорости (рис. 32.4). Выработка маневра ориентации выполняется в 2 этапа. Вначале на базе текущей ориентации и требуемой, определяемой экипажем или бортовой ЭЦВМ, находится ось, относительно которой одним вращением будет достигнута требуемая ориентация. Одновременно определяется, не приведет ли рассматриваемый маневр к замыканию рамок кардана блока инерциальных измерений. Если замыкание может произойти, то оси вращения выбираются так, чтобы обойти зону замыкания. Обычно в конце необходимо сделать крен для окончания маневра. В обоих случаях результатом расчета является направление, относительно которого вращается корабль, и угол поворота.  Рис. 32.4. Блок-схема цифрового автопилота, пассивный полет, управление стабилизацией корабля. Во втором этапе расчета вырабатывается переходная матрица, равная произведению матрицы, соответствующей начальному стабилизированному положению, и трансформирующей матрицы. Это преобразование производится один раз в расчетном цикле. ЦАП на активных участках траектории полета вырабатывает команды на управление вектором тяги ат и осуществляет управление ориентацией корабля и вектора тяги в соответствии с вырабатываемыми командами. Так как вектор тяги ат ориентирован в среднем вблизи продольной оси корабля, управление на активных участках сводится к управлению ориентацией корабля. Непосредственно перед включением ЖРД ЦАП с помощью ЖРД РСУ удерживает ориентацию в пределах узкой зоны нечувствительности. Предварительно ЦАП компенсирует смещение вектора тяги ЖРД, направляя ось тяги через центр тяжести корабля, определяется время зажигания ЖРД, перед зажиганием включаются ЖРД РСУ для осадки топлива в баках. С момента зажигания ЦАП управляет направлением вектора тяги, отклоняя ЖРД на кардане. ЖРД РСУ осадки топлива выключаются, когда ЖРД главной двигательной установки разовьет полную тягу. В период действия тяги команда по угловой скорости ориентации корабля пропорциональна углу между Vg и ат (или —Vg). ЦАП вырабатывает 3 независимых сигнала ошибок ориентации и управляет тангажом, рысканием и креном корабля, сводя к нулю эти ошибки. Управление креном осуществляется с помощью ЖРД РСУ. При управлении вектором тяги по тангажу и рысканию должны обеспечиваться стабилизация корабля, малые ошибки по скорости при выключении ЖРД, ограниченные отклонения ориентации корабля, чтобы минимизировать расход топлива и износ муфт сервомотора кардана. На рис. 32.5 представлена блок-схема одного канала ЦАП. Для простоты считалось, что команда по угловой скорости ?с уже преобразована к координатам, связанным с аппаратом. Роль ЦАП в этом случае заключается в выполнении динамических фильтрующих операций по выбору ошибок ориентации е требуемых для выработки команд сервомотору кардана и осуществления управления по этим командам. 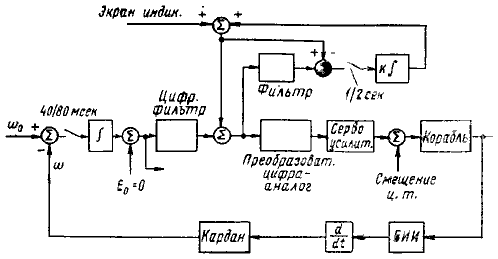 Рис. 32.5. Блок-схема цифрового автопилота, управление кораблем Apollo на активных участках траектории полета Программа бортовой ЭЦВМ управления траекторией полета ракеты-носителя Saturn V и корабля Apollo разделена на функциональные спецпрограммы в соответствии с последовательностью этапов полета на Луну: предстарт, старт, навигация, целеуказание, маневры на активных участках траектории, выставка инерциально стабилизированной платформы, вход в атмосферу, соответственно обозначаемые шифрами Р01—Р07, Р10—Р17, Р20—Р27, Р3О—Р37, Р40—Р47, Р50—Р57, Р60—Р67. Для каждого этапа полета штурман выбирает необходимую спецпрограмму и вводит ее в бортовую ЭЦВМ, набирая соответствующий ей шифр на пульте управления. Кроме спецпрограмм можно использовать различные алгоритмы и получить от бортовой ЭЦВМ полезную информацию о положении корабля в космическом пространстве, определить апогей и перигей орбиты, долготу, широту и высоту полета. Программа Р40 вводится в бортовую ЭЦВМ за 5 мин до зажигания ЖРД двигательной установки служебного отсека во всех случаях, когда осуществляется маневр управления траекторией полета корабля Apollo. Точное направление вектора тяги ЖРД в начале маневра и метод осуществления маневра зависят от параметров цели, которые должны быть заранее известны. Проблема целеуказания возникает в заданной точке космического пространства и в определенное время решается бортовой ЭЦВМ с помощью спецпрограммы Р34. Эта спецпрограмма вводится в бортовую ЭЦВМ раньше Р40. Спецпрограммой Р34 определяются потребное импульсное изменение скорости, перигейное расстояние, ожидаемый угол средней рамки кардана и выдаются экипажу заранее; кроме этого, подсчитываются расход топлива на маневр, конечная орбита и запас высоты в перигее конечной орбиты. Перед выключением спецпрограммы Р34 и отсылкой ее в память бортовой ЭЦВМ до дальнейшего использования экипаж оценивает и одобряет полученные данные – время зажигания, продолжительность маневра и расчетный вектор промаха цели,—которые используются для расчета управления маневром. Спецпрограмма Р40 вводится заранее, чтобы экипаж успел выполнить операции по «листу проверки», предшествующие каждому активному участку траектории. Основное назначение спецпрограммы Р40 заключается в навигации, управлении кораблем и контроле за системами в процессе отсчета времени, зажигании и работе ЖРД, а также выключении ЖРД в конце маневра. Перед вводом спецпрограммы Р40 для работы ЦАП должны быть подготовлены следующие данные: угловая скорость, ширина зоны нечувствительности, используемые ЖРД РСУ, расчет поворота кардана ЖРД служебного отсека. Вес командного и служебного отсеков, момент инерции, момент, создаваемый ЖРД, подсчитываются и прослеживаются во время работы ЖРД. После завершения подготовительных расчетов ЦАП подсчитывается начальное направление вектора тяги и величина необходимого изменения вектора скорости Vg; 3 компоненты вектора Vg в координатах относительно местной вертикали выдаются на приборную доску штурмана (ему предоставлено право сбросить программу, если он заметит большие ошибки в расчетах). Далее ЦАП, определяет предпочтительную ориентацию блока инерциальных измерений, при этом ось Х стабилизированной платформы направляется вдоль расчетного направления вектора тяги. Если угол средней рамки кардана превышает 45°, штурман включает программу перенастройки блока инерциальных измерений. После новой выставки блока инерциальных измерений штурман снова может включить спецпрограмму Р40. Если закончена выставка блока инерциальных измерений ЦАП выбирает порядок маневрирования, обеспечивающий необходимое направление вектора тяги. После расчета маневра ЦАП запрашивает штурмана произвести проверку привода кардана ЖРД (для безопасности); после проверки производится триммерная подгонка углов кардана. ЦАП начинает выдавать время в минутах и секундах до начала работы ЖРД; в оставшиеся 45 сек вспыхивает сигнальная лампа и штурман, если найдет нужным, может сбросить программу. За 30 сек до зажигания спецпрограмма Р40 обращается к листу ожидающих программ, чтобы начать интегрирование по «методу среднего g». Штурман готовит двигательную установку служебного отсека, включает рубильник на главной панели и рукоятки управления на дискретный режим. ЦАП выдает команду на включение ЖРД РСУ для осадки топлива в баках. Штурман следит за изменением скорости, выдаваемой на экран-индикатор, и убеждается, что осадка происходит. За 5 сек. до зажигания штурману выдается сигнал о готовности к работе главного ЖРД и это последняя возможность сбросить выполнение маневра с работающими ЖРД. Если принято решение продолжать полет, ЦАП включает ЖРД и одновременно изменяется режим работы ЦАП с пассивного полета на активный. ЖРД РСУ осадки топлива выключаются, как только главный ЖРД разовьет полную тягу. Экран-индикатор начинает показывать время до выключения ЖРД и Vg. Штурман следит за выполнением маневра по экрану-индикатору, убеждается в том, что оставшееся время работы ЖРД уменьшается и Vg уменьшается; по шаровому индикатору полета он следит, чтобы ошибки ориентации и скорости ориентации лежали в допустимых пределах. Когда ЦАП определит, что целевые условия маневра достигнуты, посылается сигнал на выключение ЖРД служебного отсека, и ЦАП переключается на пассивный полет. В конце работы ЖРД на экране-индикаторе выдается остаточная скорость Vg и ее компоненты в координатах корабля. Штурман может вручную подрегулировать эти компоненты скорости с помощью рукояток управления поступательным перемещением и вращением корабля. Когда маневр закончен, ЦАП определяет параметры новой орбиты корабля, выдает эту информацию на экран-индикатор и запрашивает штурмана, перейти ли на программу холостого хода или на какую-либо другую из главных программ. [4—15, 18—20.] 3.3. Наземная сеть NASA дальней космической радиосвязи и слежения за пилотируемыми кораблями Наземная сеть дальней космической радиосвязи NASA с пилотируемыми кораблями впервые проверялась на дальность до Луны в полете Apollo-8 в декабре 1968 г. (см. рис. 33.1). Сеть связи использует 2 ИСЗ на стационарных орбитах, 17 наземных станций, 4 морских судна с радиооборудованием, от 6 до 8 специально оборудованных самолетов для наблюдения за полетом корабля и выполнения большого объема работы по связи, телевидению и телеметрии. Сеть спроектирована для обеспечения непрерывной связи космонавтов с Землей от старта в процессе всего полета к Луне и до посадки. 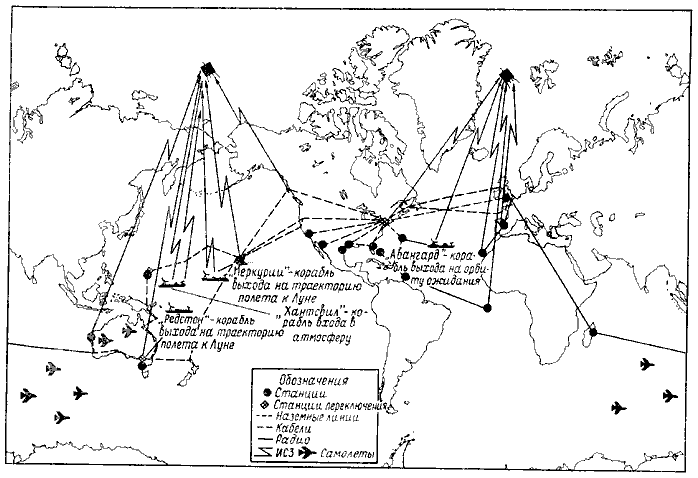 Рис. 33.1. Наземная сеть дальней космической радиосвязи NASA с пилотируемыми кораблями. Она поддерживает тесный контакт наземного контрольного центра с кораблем Apollo и астронавтами в процессе всего полета, за исключением приблизительно 45 мин, когда Apollo, двигаясь по орбите ИСЛ, находится за Луной. Связь с Apollo делится на 2 этапа: на первом этапе во время старта и полета по орбите ИСЗ сеть связи использует цепь станций, оборудованных 9-м антеннами; на втором этапе, когда Apollo удалится от Земли более чем на 18 000 км, связь осуществляется более мощными и более точными антеннами диаметром 26 м и 46 м. В зависимости от азимута старта, Apollo начинает работать со станциями с 9-м антеннами на о. Меритт, Багамских о-вах, Бермудах, корабле «Авангард», Канарских о-вах, в Карнарвоне (Австралия), Гавайских о-вах, втором корабле слежения, Гуаме, Мексике и Корпус Кристи (шт. Техас). Для выхода на траекторию полета к Луне Центр управления полетом посылает сигнал через одну из наземных станций или через один из кораблей слежения в Тихом океане. Когда Apollo возьмет курс на Луну, работа ЖРД отслеживается кораблем и самолетами. Самолеты осуществляют релейную связь для передачи голоса астронавтов и другой информации в Хьюстон. Когда Apollo достигнет высоты 18 000 км, слежение осуществляется антеннами, диаметром 46 м, которые установлены на земном шаре через 120°—вблизи Мадрида (Испания), в Голдстоуне (Калифорния) и Канберре (Австралия). При таком расположении по крайней мере одна антенна все время в поле обзора имеет Луну. Принятая информация передается сетью связи NASA – наземными линиями, подводными кабелями, радиостанциями и спутниками связи в Хьюстон, подается в ЭЦВМ и отображается на экране, например на экране изображается точное положение корабля на большой карте или сигнализируется красным светом, требующим от контрольного центра принятия мер, падение мощности и другие неполадки в системах Apollo. Данные, передаваемые наземными станциями, сообщают необходимую информацию для осуществления маневров на среднем участке траектории полета, обеспечивающих точную траекторию облета Луны. Когда Apollo находится вблизи Луны, передается величина необходимого тормозного импульса для вывода Apollo на траекторию ИСЛ. После отделения лунного корабля от основного блока и выхода на другую орбиту сеть связи следит за обоими аппаратами, одновременно обеспечивая 2-стороннюю связь с Землей и прием телеметрии. Слежение и обмен информацией между Землей и двумя аппаратами помогает в осуществлении встречи и стыковки. Обмен информацией используется также для расчета времени и продолжительности работы ЖРД служебного отсека, для коррекции траектории перед входом в атмосферу и посадкой в расчетную точку. В полетах Apollo используются 2 связных ИСЗ Intelsat. ИСЗ над Атлантическим океаном обслуживает в S-диапазоне станции на о. Асеншон, судно в Атлантическом океане и станции на Канарских о-вах. Второй ИСЗ над серединой Тихого океана обслуживает станции в Карнарвоне – (Австралия) и суда в Тихом океане. Все эти станции могут через спутники одновременно передавать информацию, в Хьюстон и в Центр пилотируемых полетов им. Годдарда. В части секундных интервалов процесса связи с Центром пилотируемых полетов NASA ведется «разговор» с одним или двумя космическими кораблями одновременно. Скоростные ЭВМ на базах связи передают команды или принимают данные о давлении в кабине, команды для орбитального полета или указание для выполнения необходимых операций. Когда информация поступает из Хьюстона, ЭВМ обращаются к их запрограммированной информации, прежде чем передать необходимые данные на космический корабль. Такая передача информации осуществляется по каналу УКВ со скоростью 1200 бит/сек. Связь между наземными базами производится с той же скоростью. Хьюстон читает информацию с наземных баз со скоростью 2400 бит/сек и с движущихся баз со скоростью 100 слов в 1 мин. Непрерывно принимаемая датчиками на космическом корабле информация о давлении и температуре в кабине, показатели физического состояния астронавтов (пульс, частота дыхания и другие) передается на Землю со скоростью 51,2·10? бит/сек.[22.] 3.4. Методы осуществления аварийного возвращения на Землю экипажа Apollo Аварийное спасение экипажа Apollo может быть осуществлено в любой момент в процессе старта и вывода на орбиту или в процессе последующих этапов полета после выхода на орбиту ИСЗ. Аварийное спасение осуществляется следующими методами. Метод I. Система аварийного спасения отбрасывает командный отсек от ракеты-носителя. Этот метод применим от To -45 мин, когда система аварийного спасения взведена, до момента ее сброса в To +3 мин 07 сек с момента старта; командный отсек осуществляет посадку на расстоянии до 800 км от стартовой позиции. Метод 2. Применяется после сброса системы аварийного спасения и до тех пор, пока ЖРД служебного отсека может вывести командный и служебный отсеки на безопасную орбиту ИСЗ (T0 +9 мин 22 сек от старта) или на посадку у берегов Африки. Метод 3. Применим от момента, когда при полной аэродинамической подъемной силе может быть достигнута дальность 5931 км и до выхода на орбиту ИСЗ. Основной блок отделяется от ракеты-носителя, если необходимо, используется ЖРД служебного отсека для торможения, командный отсек входит в атмосферу, ориентированный на половину максимальной аэродинамической подъемной силы и производит посадку на расстоянии 6 200 км. Метод 4. Применим, когда ЖРД служебного отсека может быть использован для вывода Apollo на орбиту ожидания (T0 +9 мин 22 сек от старта). Метод 4 предпочтительнее по сравнению с методом 3. Если возникнет необходимость аварийного возвращения в процессе активного участка выхода на траекторию полета к Луне, используется ЖРД служебного отсека для создания тормозного импульса, обеспечивающего вход командного отсека в атмосферу. Этот метод применим только при возникновении крайней опасности для жизни экипажа. Место посадки корабля будет зависеть от азимута старта и продолжительности активного участка вывода на траекторию полета к Луне. Если аварийное возвращение потребуется после выхода на траекторию полета к Луне, тогда включение ЖРД служебного отсека через 90 мин после выхода на траекторию полета к Луне обеспечивает тормозной импульс, после которого корабль может произвести посадку в Атлантическом океане на линии номинального возвращения. На пассивном участке траектории полета к Луне аварийное возвращение на этапе 3-сут полета к Луне подобно возвращению через 90 мин после выхода на траекторию полета к Луне. Аварийное возвращение из Дальнего космоса осуществляется в точку антипода Луны (где прямая линия, соединяющая центры Земли и Луны пересекает поверхность Земли, противоположную Луне); вращение Земли влияет на географические координаты точки антипода. Продолжительность возвращения выбирается такой, чтобы в момент посадки точка антипода находилась на 165° з. д. Место посадки в центре Тихого океана совпадает с точкой антипода один раз в сутки; если аварийная ситуация требует более быстрого возвращения, то посадка может быть осуществлена в Атлантический океан, в западной части Тихого океана или в Индийский океан. Если Apollo вошел в сферу влияния Луны, возвращение после облета Луны может быть осуществлено быстрее, чем прямое возвращение на Землю. Если ЖРД служебного отсека отказал вначале активного участка выхода на орбиту ИСЛ, возвращение командного отсека в точку антипода, можно осуществить тремя методами. Метод I. Если ЖРД служебного отсека отказал в течение первых 2 мин работы, тогда приблизительно через 2 ч, в следующем периселении запускается ЖРД посадочной ступени лунного корабля и выводит корабль Apollo на траекторию полета к Земле. Метод 2. Если ЖРД служебного отсека отказал между 2 и 3 мин работы, необходимо, используя ЖРД посадочной, ступени, подрегулировать орбиту до безопасной и в следующем периселении вторично включить ЖРД, нацелив траекторию возвращения в центр Тихого океана. Метод 3. Если аварийное возвращение начинается после 3 мин работы ЖРД и до конца активного участка выведана орбиту ИСЛ, Apollo должен сделать один или два оборота вокруг Луны, прежде чем можно будет в периселении включить ЖРД посадочной ступени и рассчитать траекторию возвращения с посадкой в центре Тихого океана. Если необходимо осуществить аварийное возвращение с орбиты ожидания вокруг Луны, вывод на траекторию полета к Земле производится раньше запланированного и траектория возвращения нацеливается в точку посадки в центре Тихого океана. [21.] 1. Merchant D. Н., Gates R. М., Murray J. F. Prediction of Apollo service module motion after jettison. AIAA Paper № 70—1047, ЭИ АиР, 1971, № 10; РЖ, 1971, 2.41.210 2. Ghen P. P. Real-time Kalman filtering of Apollo LM/AGS rendezvous radar data, AIAA Paper № 70—957, ЭИ АиР, 1971, № 10; РЖ 1971, 2.41.273 3. LM AGS programmed equations document (Flight—program 6), TRW System document № 11176—6041—TO—OO, April, 1969 4. МiсheIsоn J. Lunar mascon effects on orbits of Apollo type spacecraft. J. Spacecraft and Rockets, 1970, 7, № 1, (ЭИ АиР, 1970, № 32) 5. Gapcynski J. P., Blackshear W. Т., Compton Н. R. Lunar gravitational field as determined from Lunar Orbiter traking data. AIAA Journal, 1969, 7, № 10, (ЭИ АиР, 1970, № 19) 6. Young К. A., Alexander J. D. Apollo lunar rendezvous. AIAA Paper № 70—26, ЭИ АиР, 1970, № 25; РЖ, 1970, 8.41.65 7. Rea F. G., Fisсheг N. Н. Generalized navigation error analysis. AIAA Paper № 70—1004, ЭИ АиР, 1971, № 16; РЖ, 1971, 3.41.191 8. Вуrnes D. V., Hooper Н. L. Multi—conic: a fast and accurate metod of computing space flight trajectories, AIAA Paper № 70—1062, ЭИ и АиР, 1971, № 2; РЖ, 1971, 2.41.52 9. Wagner J. Т., Кisner D. М. Performance evaluation of intercept rendezvous guidance and navigation for advanced space missions. Proc. Nat. Aerospace Electron. Conf., Dayton, Ohio, 1967, ЭИ и АиР, 1970, № 43 10. Stern R. J., Stern G. S., Forester К., Escobal P. R. The hybrid patched conic applied to lunar return trajectory propagation, J. Astronaut. Sci., 1969, 17, № 1, ЭИ АиР, 1970, № 38; РЖ, 1970, 8.41.63 11. Satin A. L., Pixie у Р. Т. Statistics of state—vector corrections for Apollo onboard computers. AIAA Paper, № 70—162, ЭИ АиР, 1970, № 33; РЖ, 1970, 10.41.255 12. Нorrigan R. С., Walsh R. C. Manual onboard methods of orbit-determination. AIAA Paper №70—159, ЭИ АиР, 1970, №33. 13. Culbertson J. D. Variational equation of a ballistic trajectory and some of its applications. J. Spacecraft and Rockets, 1970, 7, № 6, ЭИ АиР, 1970, № 41; РЖ, 1970, 12.41.62. 14. Dickmanns E. D. Optimal dreidimensionale Gleitflugbahnen beim Eintritt in Planeten atmospheren. Raumfahrtforchung, 1970, 14, №3, ЭИ АиР, 1970, № 41; РЖ, 1970, 11.41.96 15. Bennett F. Lunar descent and ascent trajectories. AIAA Paper № 70—25, ЭИ АиР, 1970, № 31 16. Rice A. F., Apollo—Saturn launch vehicle targeting program. AIAA 8th Aerospace Sci. Conf. Jan. 1970. 17. Rice A. F., Мооre V. V. Saturn V launch behicle targeting. AIAA Paper № 70—1052 18. О'Вгien R. М., Sheats J. P. Saturn V navigation update. AIAA Paper № 69—883 19. Wollenhaupt W. R. Apollo orbit determination and navigation. AIAA Paper № 70—27 20. Graves С. А., Наrроld J. C. Re—entry targeting philosophy and flight results from Apollo—10 and 11. AIAA Paper № 70—28 21. НуIe С. Т., Foggatt С. E., Weber В. D., Geгbгасht R. J., Diamant L. S. Abort planning for Apollo missions. AIAA Paper № 70—94 22. Space flight network. Speceflight, 1971, v. 13, № 2; РЖ ИКП 62 № 11, 1971 Глава IV Космические летные испытания Saturn V Apollo и пилотируемые полеты на Луну 4.1. Беспилотные космические летные испытания Saturn V Apollo Программой наземных и космических летных испытаний Saturn V Apollo предусматривались доводка надежности, оценка летных характеристик, доказательство возможности осуществления пилотируемого полета с посадкой на Луне и возвращение экипажа на Землю. Космические летные испытания Saturn V Apollo проводились последовательно по этапам. Ниже изложены результаты беспилотных космических летных испытаний – полеты Apollo-4, 5 и 6. Apollo-4. 9 ноября 1967 г. был осуществлен полет Apollo-4; это был первый полет ракеты-носителя Saturn V. После запуска ЖРД F-1 ступени S-IC отрыв ракеты-носителя от стола произошел через 9 сек, точно в расчетное время. Двигатели первой ступени работали 153 сек, расчетное время 150,6 сек. По расчетной траектории Saturn V к концу работы двигателей первой ступени должна была находиться на высоте 61 км и на дальности 160 км. В полете скорость, соответствующая числу Маха М=1, была пройдена на 61-й сек на 970 м ниже расчетной высоты. Максимальное продольное ускорение в конце работы двигателей первой ступени было 4,15 g, на 0,004 g выше расчетного. Максимальный скоростной напор был достигнут на 78-й сек полета, на 0,4 сек раньше, чем ожидалось. По расчету ступень S-II должна увеличить скорость полета от 2,23 до 6,9 км/сек. Двигатели второй ступени работали 6,1 мин, на 4,7 сек больше расчетного времени. Приращение скорости за счет работы второй ступени составило 4567,44 м/сек. Вторая ступень отделилась через 9 мин после старта ракеты-носителя Saturn V. По расчету ступень S-IV В осуществляет разгон до скорости 7,88 км/сек и выводит корабль на орбиту ожидания высотой 185 км. В полете ЖРД J-2 ступени S-IVB проработал 2,75 мин, на 6,2 сек больше расчетного времени и выключился через 11 мин 6 сек полета. Через 11 мин. 16 сек полета от момента старта, т. е. на 9 сек позже расчетного времени, ступень S-IVB и основной блок корабля Apollo вышли на орбиту ИСЗ высотой 188 км при скорости полета 7798, 25 м/сек. После двух витков полета по орбите ИСЗ при угле тангажа 40, 08° и рыскания 14, 85° вторично было произведено включение ЖРД J-2 ступени S-IVB на 5 мин 33 сек и корабль вышел на эллиптическую орбиту с высотой над Землей в апогее 17 400 км. Через 10 мин ступень S-IVB отделилась от основного блока корабля Apollo. Чтобы увеличить апогей орбиты до 18 350 км, был отключен на 15 сек ЖРД служебного отсека. Фактическая высота оказалась равной 18 317 км и наклон орбиты к экватору 30,13°. 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16, 17, 18, 19 |
|||||||